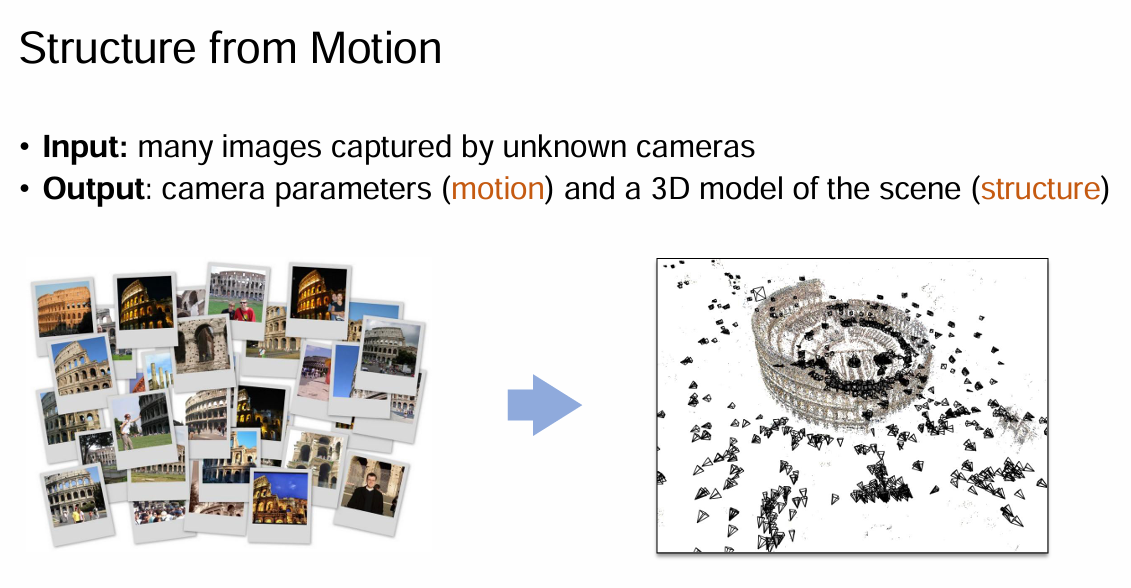
Structure from Motion
SfM vs Calibration & Triangulation¶
- Calibration
- Input: point pairs from 3D to 2D
- Output: camera parameters
- Triangulation
- Input: camera parameters, point pairs from 2D to 2D
- Output: 3D points
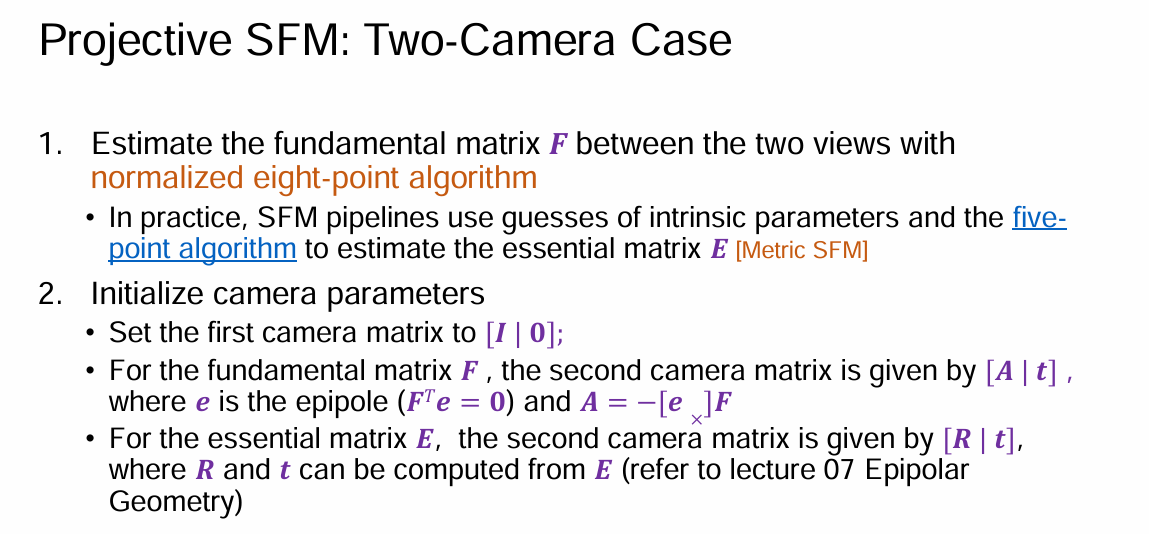
- Fundamental Matrix
- Input: 2D point pairs (at least 8)
- Output: Fundamental Matrix
- SfM
- Input: point pairs from 2D to 2D
- Output: 3D points and camera parameters
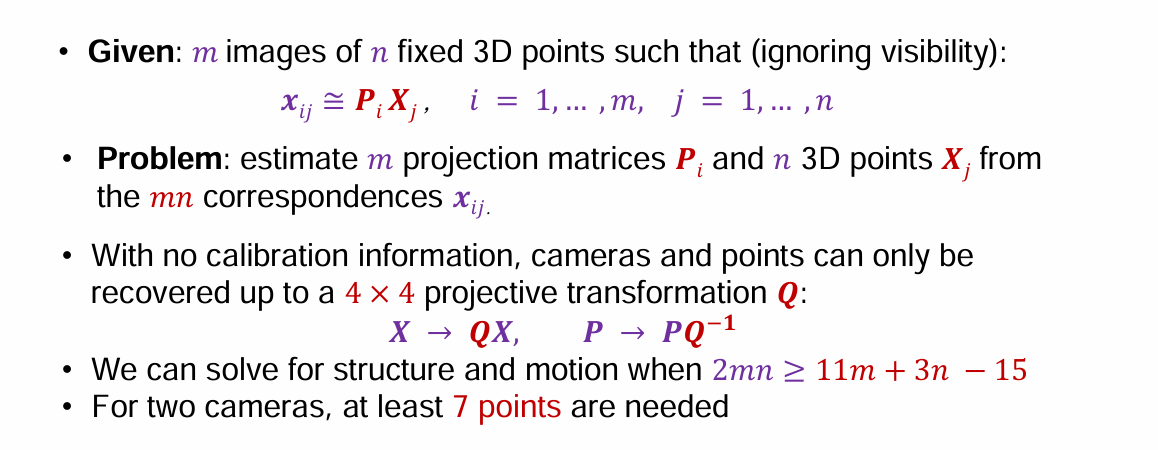
Problem formulation¶
Input: \(m\) images of \(n\) fixed 3D points (ignoring visibility) such that (\(m\) 张图像, 每张图像有 \(n\) 个点, 是要重建的三维坐标的像素坐标)
Output: estimate \(m\) projectoin matrices \(P_i\) and \(n\) 3D points \(X_j\) from the \(mn\) correspondences \(x_{ij}\)
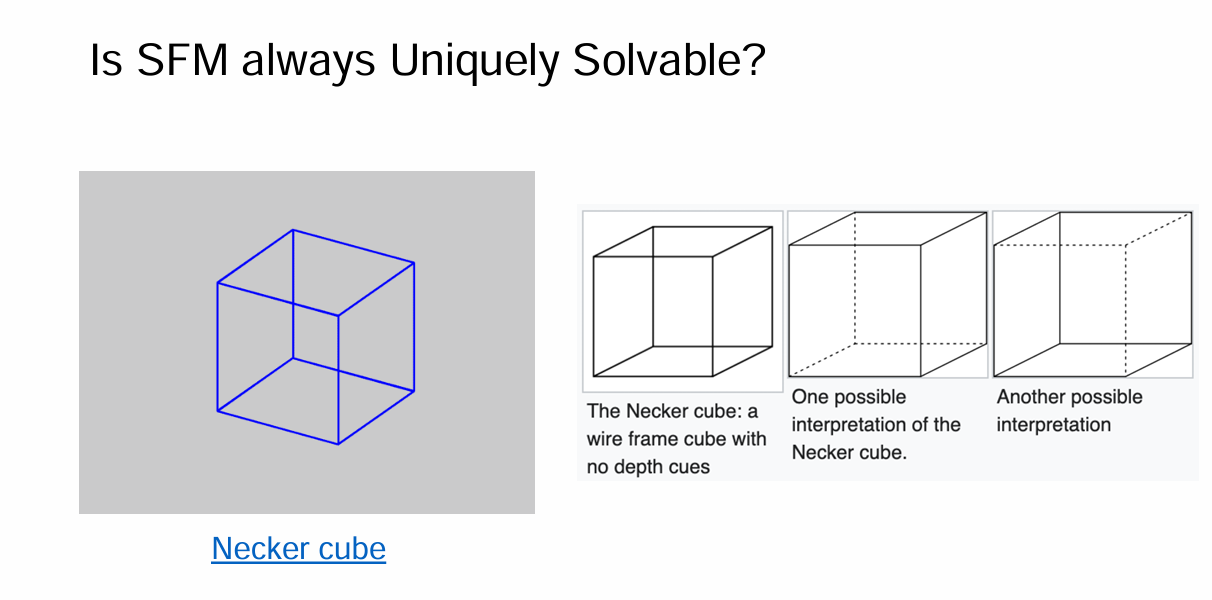
The Ambiguity of SfM¶
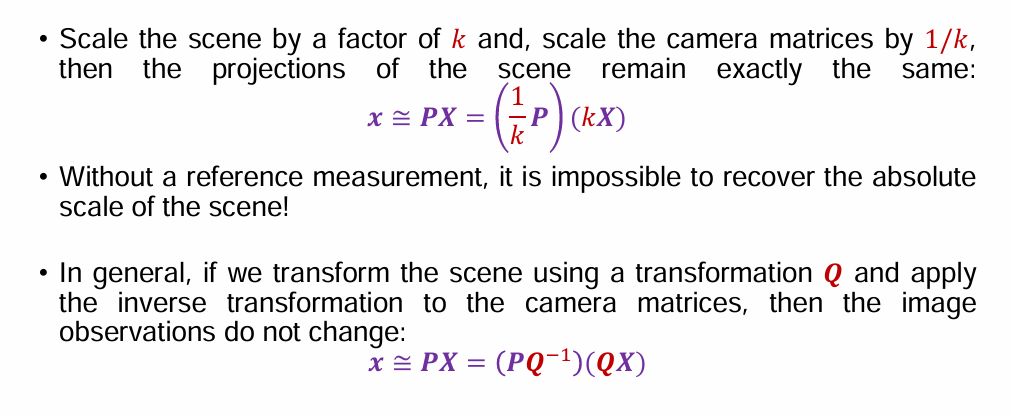
即使我们对整个场景做了一个变换, 得到的点也不会改变.
平行性约束: 要求 \(Q\) 不能把平行线变成不平行了
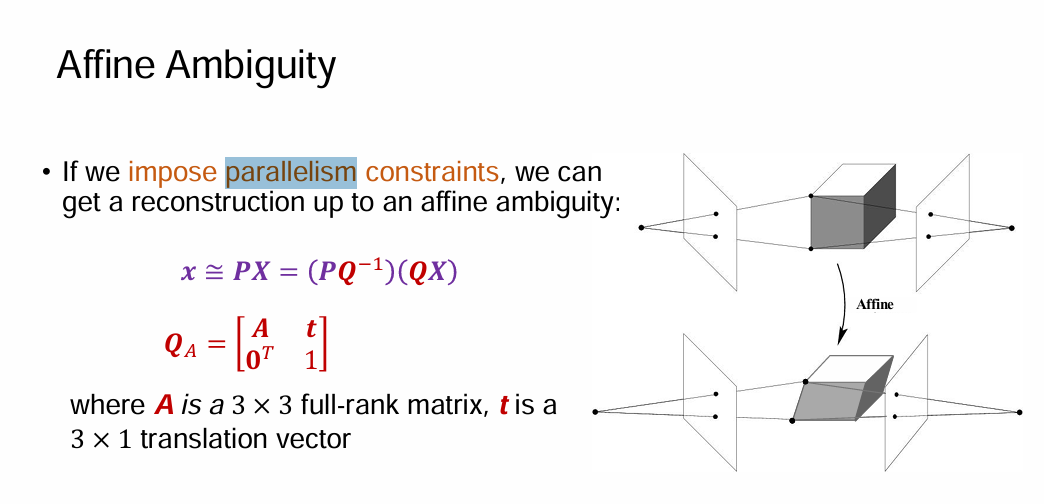
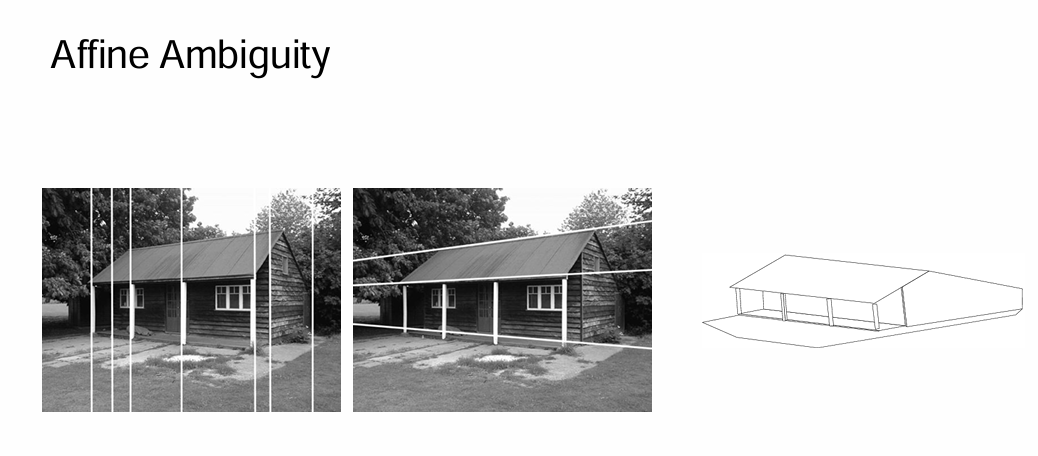
(可以看到, 图中的平行线仍然保持平行)
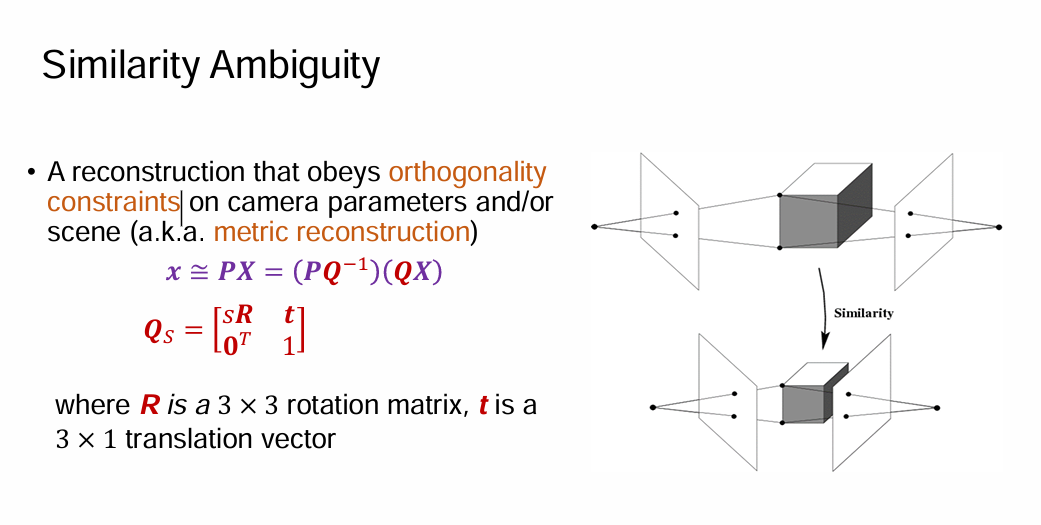
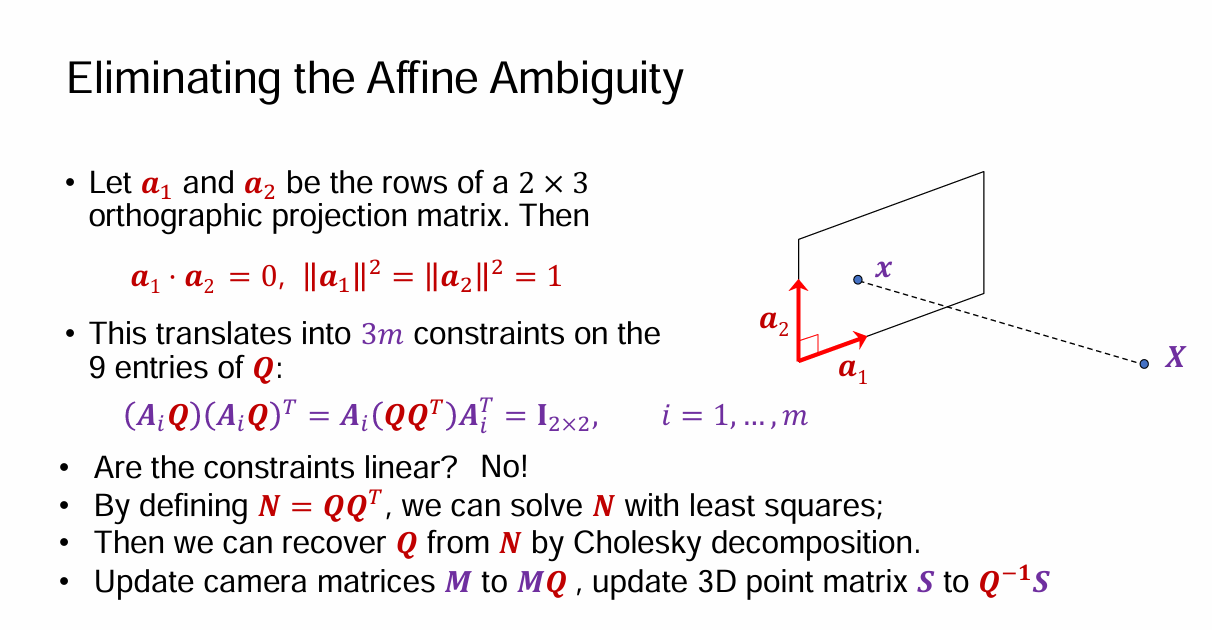
正交约束
Affine SfM¶
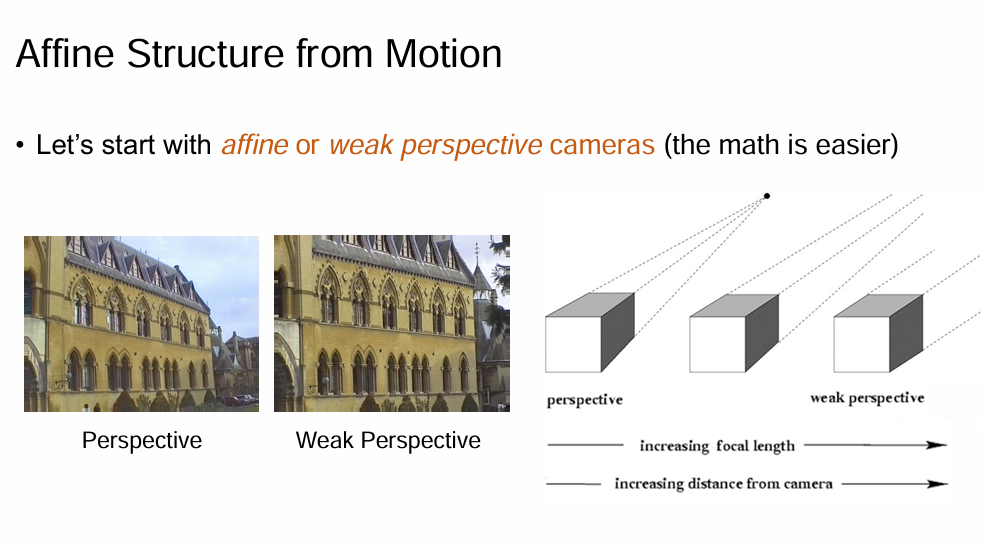
当相机离物体很远, 或者焦距很大的时候, 近大远小的效果不是很明显, 因此可以近似认为是正交投影
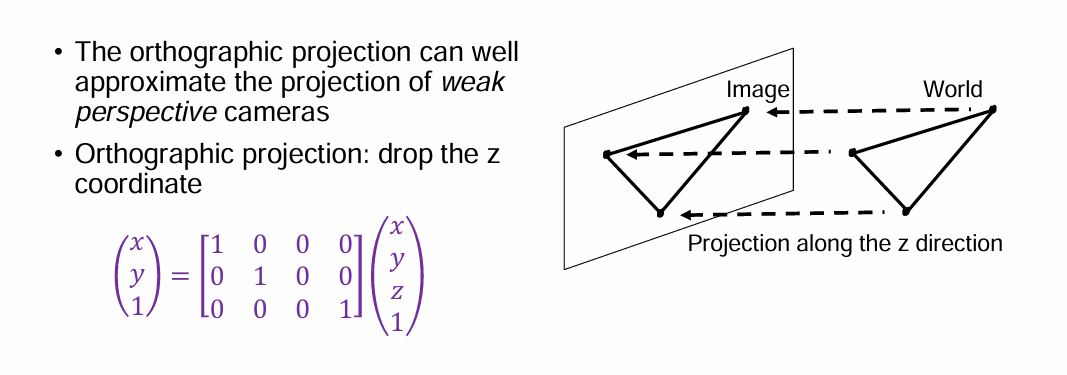
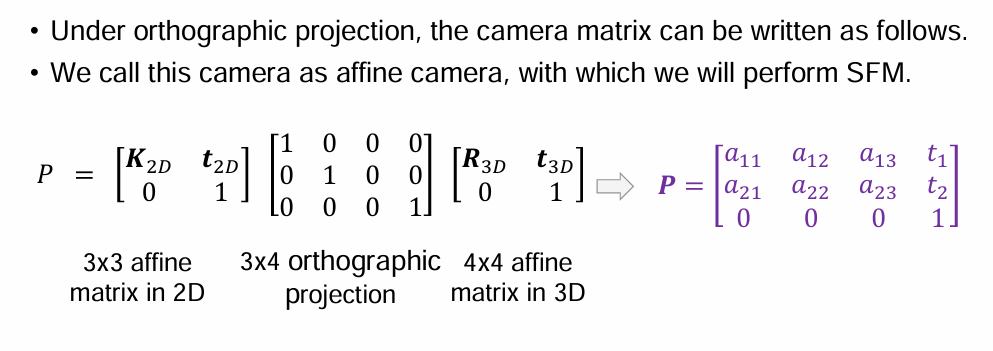
在 非齐次坐标的情况下:

因此, \(x_{ij}\) 可以写成 \(x_{ij}=A_iX_j+t_i\)
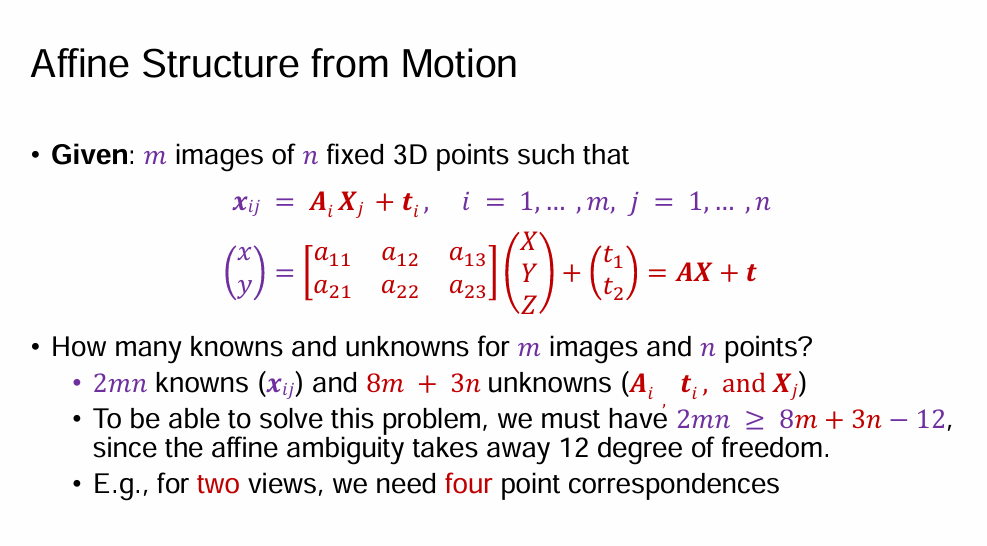
有 12 个自由度的仿射变换我们是无法确定的, 因此自由度为 8m+3n-12.
通过 centering, 我们可以去掉平移部分:
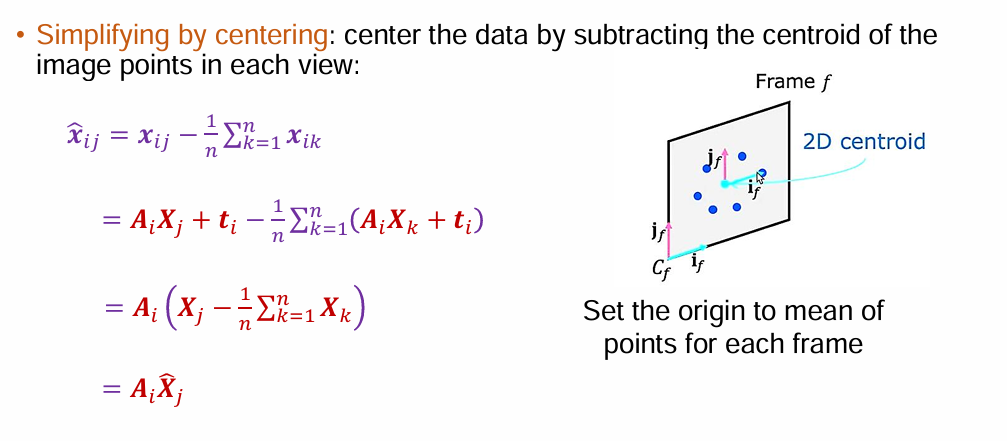
定义世界坐标系的原点为三维坐标点的中心, 我们就可以不用对三维坐标进行平均.
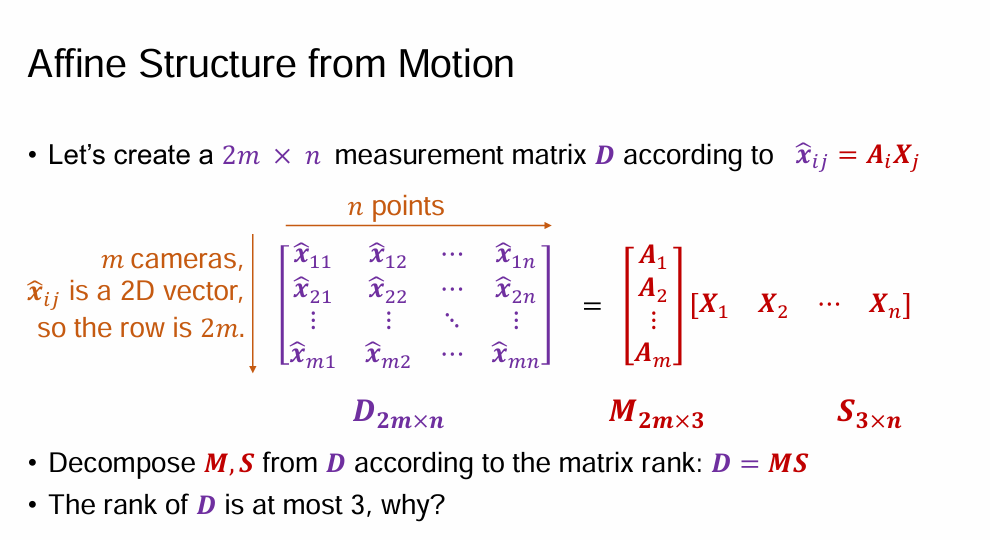
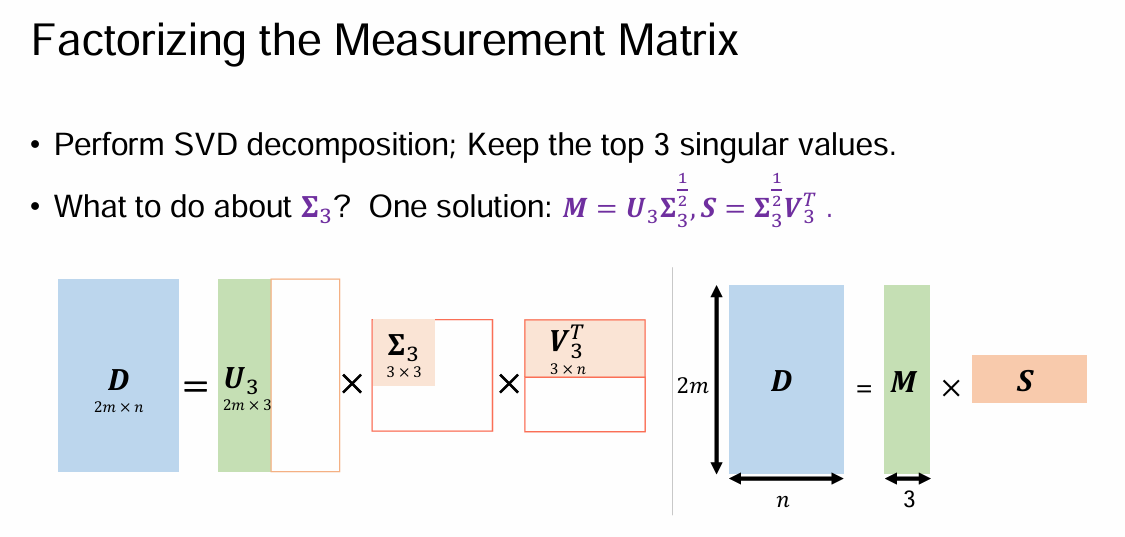
利用 SVD 分解可以进行低秩近似并且做分解, 从而找到一组可行解.
利用之前仿射相机的约束, Ai 矩阵的第一行和第二行应该是标准正交的
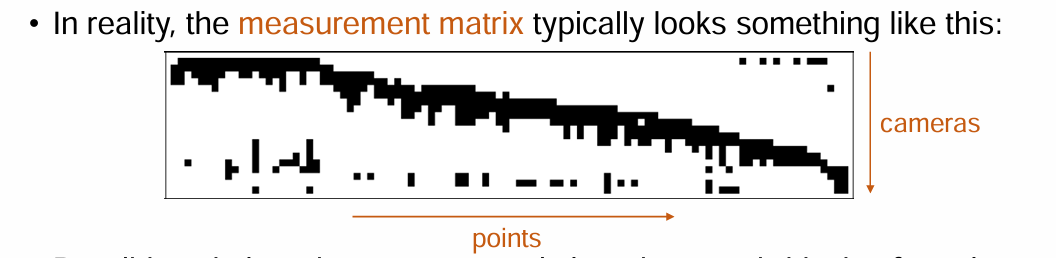
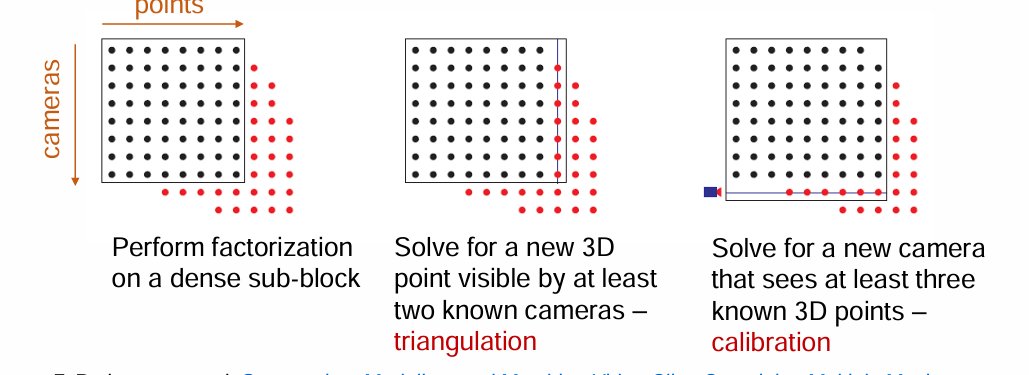
Dealing with Missing Data¶
在实际情况中, 很多点可能不会在某张照片出现
-
Incremental bilinear refinement
-
首先找到一个稠密子团, 按照之前方法求出相机参数和三维坐标.
- 接下来我们看右边一列, 因为我们已经知道了相机参数还有对应点的坐标, 所以可以做 triangulation 求出三维坐标
- 接下来再看下面一行, 这些行的每个点我们都有原始的三维坐标和当前图像的像素坐标, 可以做 calibration 求出相机参数.
- 一直这样增量的做下去.
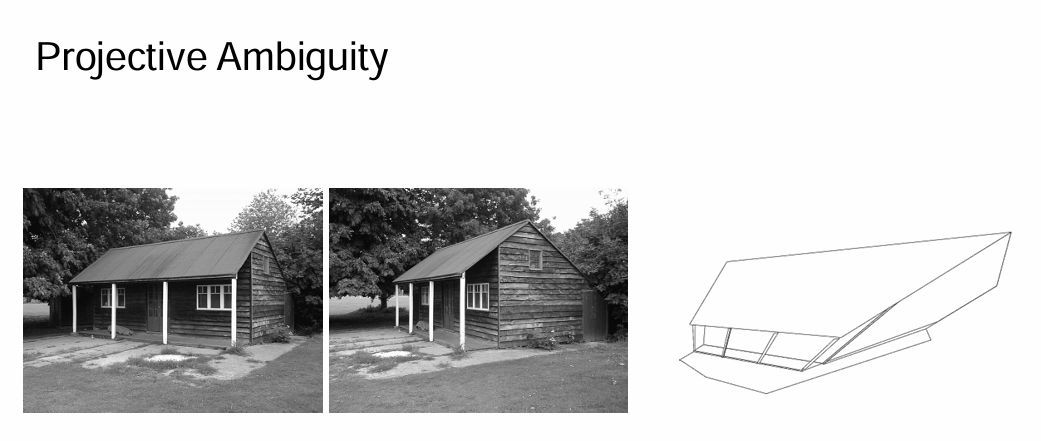
Projective SfM¶
一般情况下, 如果对 \(Q\) 没有任何约束:
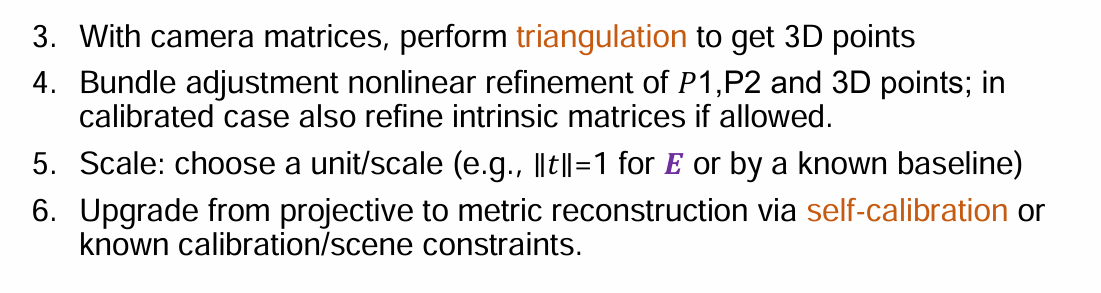
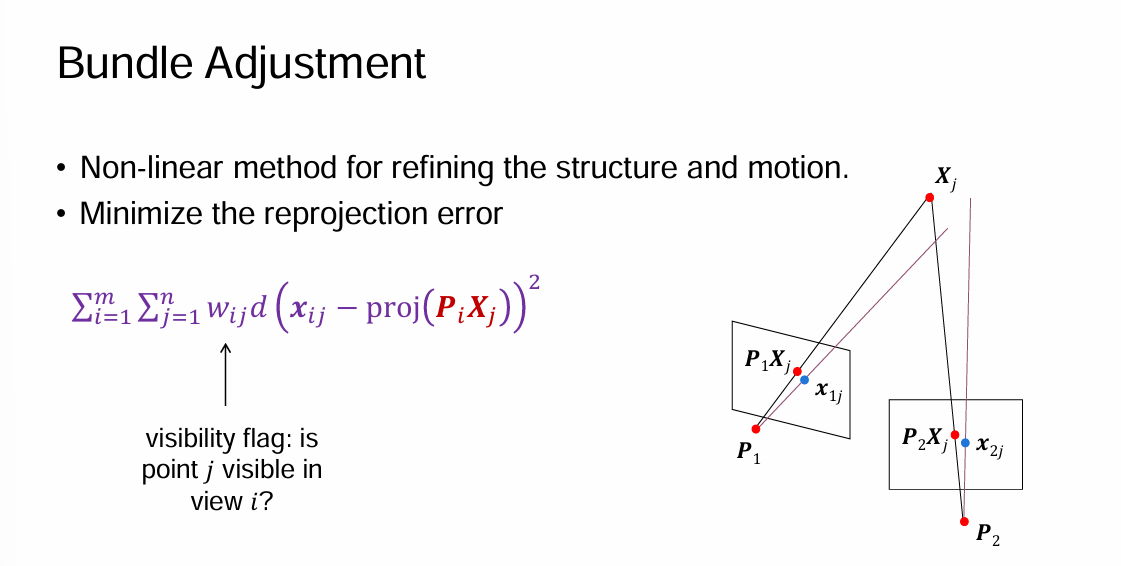
Incremental SfM¶
就是刚刚讲的思路, 最后做一次 bundle adjustment 优化一下整体结果.