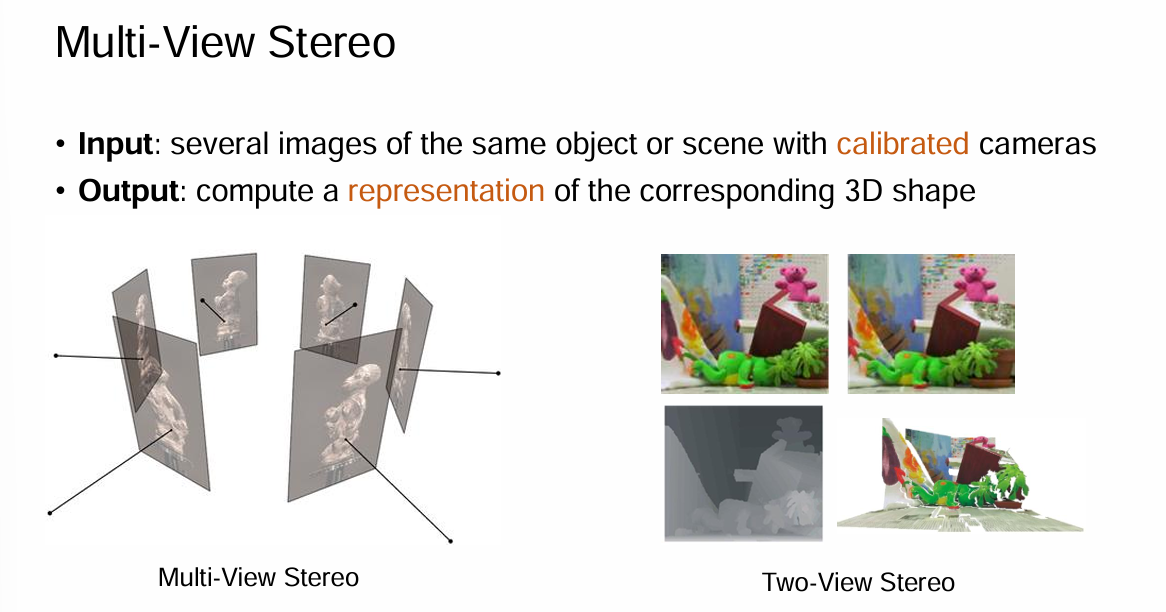
Multiview Stereo
Visual Hull based MVS¶
视觉凸包. 通过把每个相机的轮廓线画出来求交得到物体的一个轮廓, 填充轮廓内部.
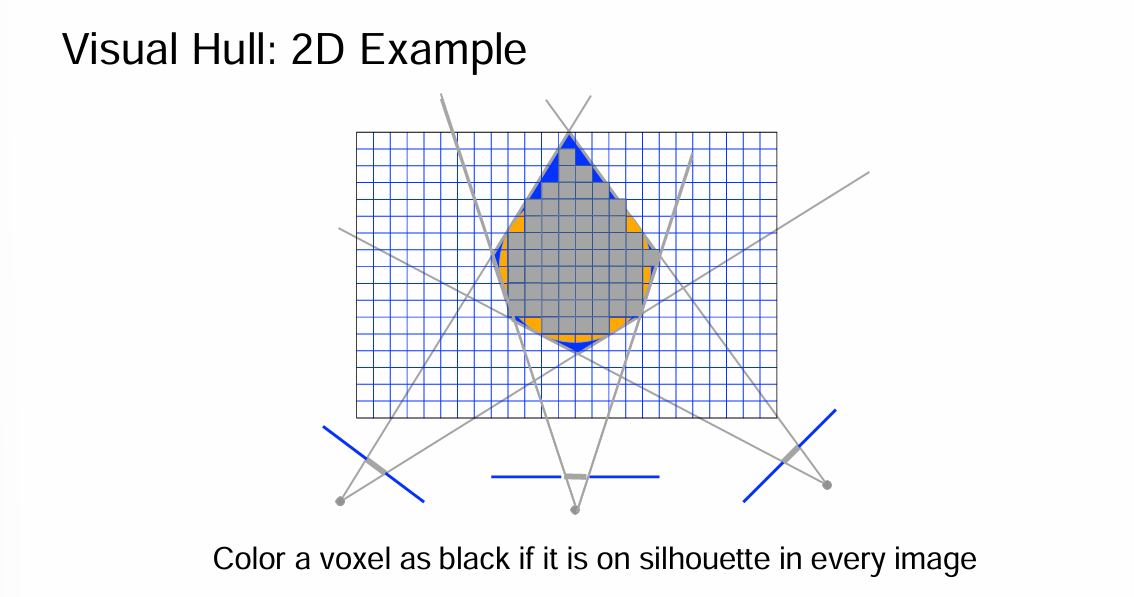
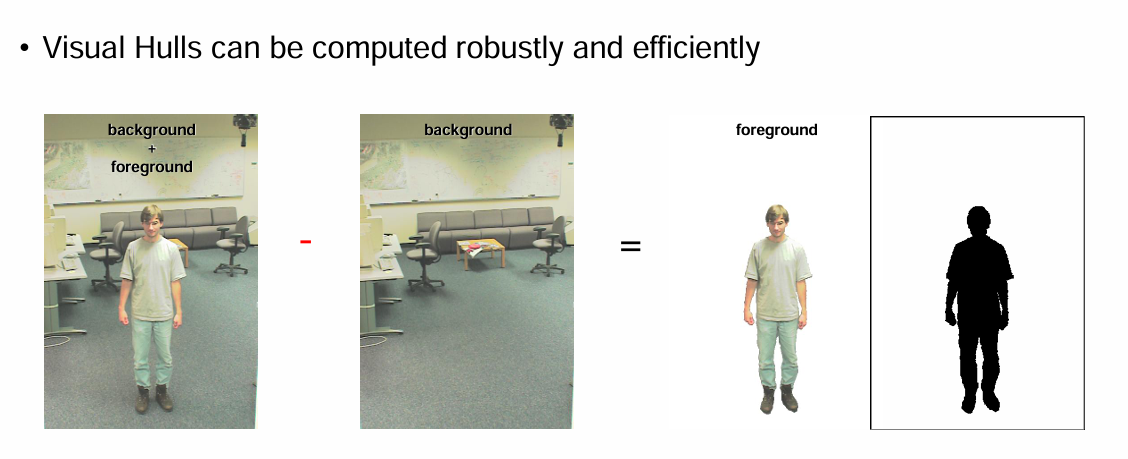
通过先不让人出现拍一张照片, 再让人出现拍一张照片, 然后相减, 我们就可以得到轮廓线
Plane-Sweep Stereo¶
先以一张图像为参考, 投射到 \([Zmin, Zmax]\) 的深度 (可以均匀划分), 得到不同的深度的三维坐标. 将坐标重投影到其他源图像 \(I_i\) 上, 得到像素颜色值, 计算一下这些颜色值的方差, 选择使得方差最小的深度.
Depth Map based MVS¶
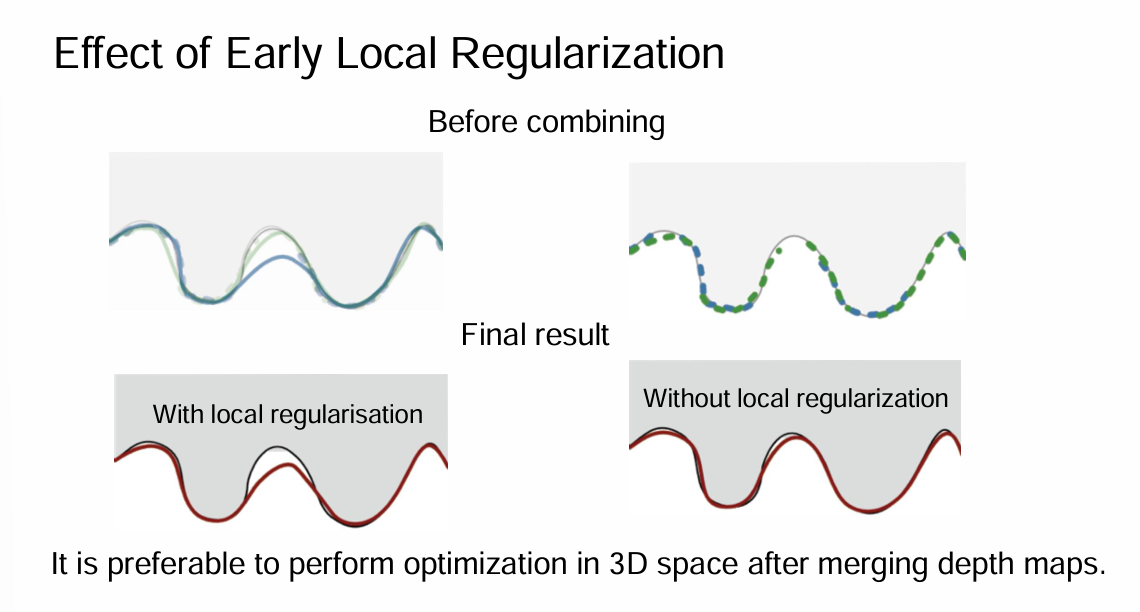
每次通过相邻两个相机构建深度图 Two-View Stereo, 最后 merge 起来
注意不要进行平滑处理, 因为我们有很多相机, 直接平滑处理可能会因为很多点没拍到而导致结果很大误差.
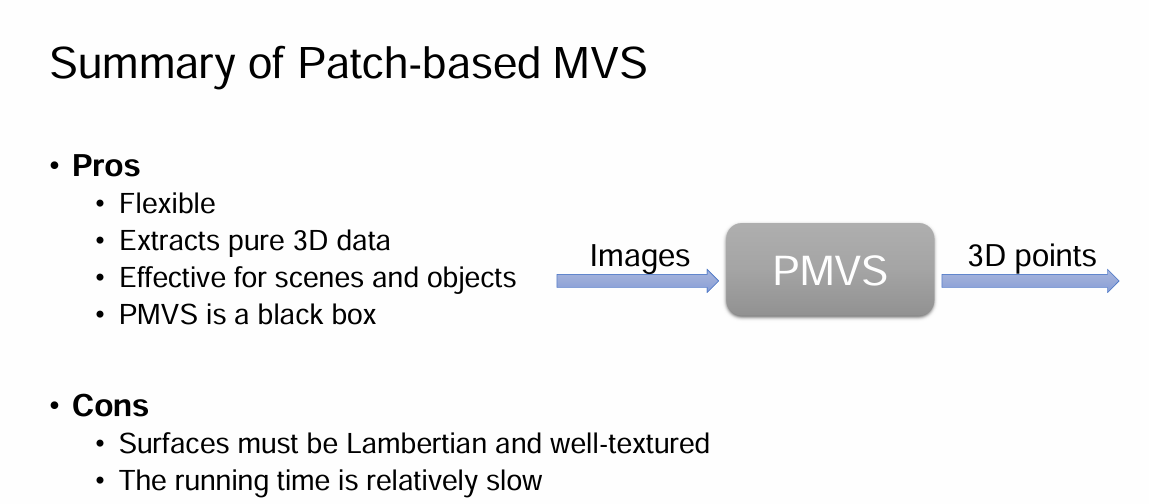
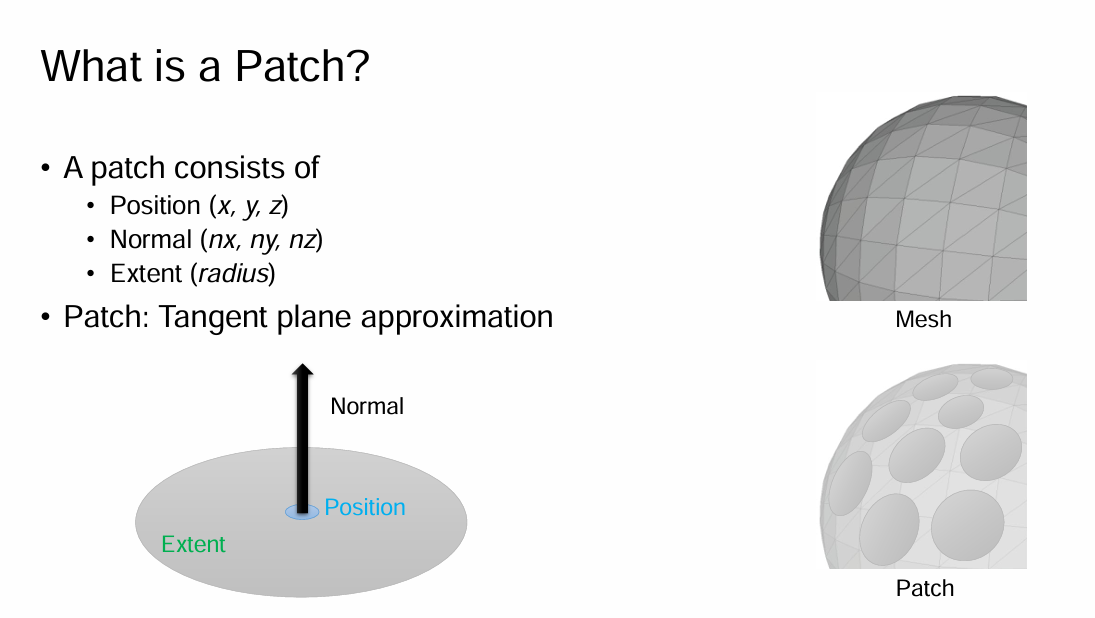
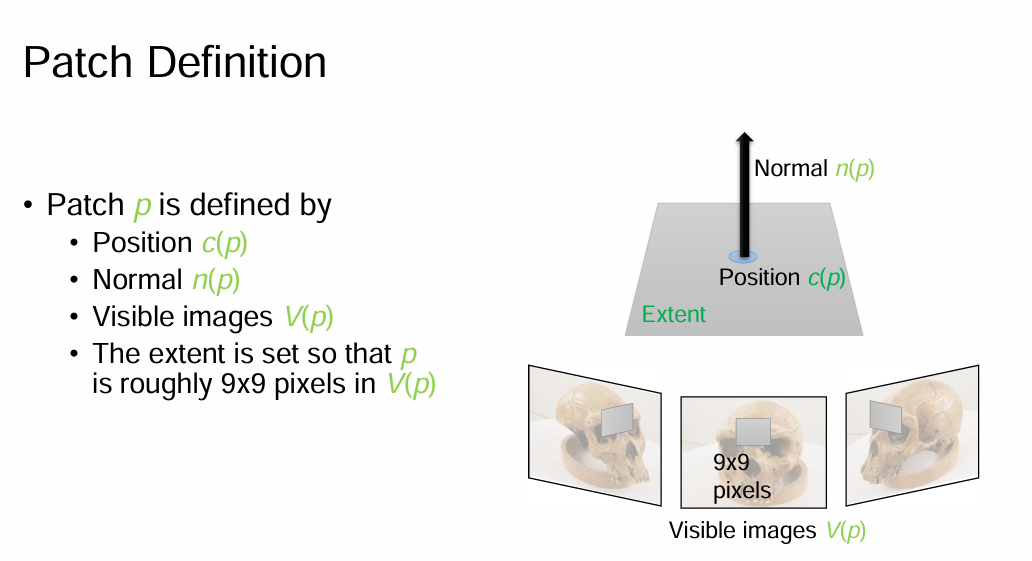
Patched-based MVS¶
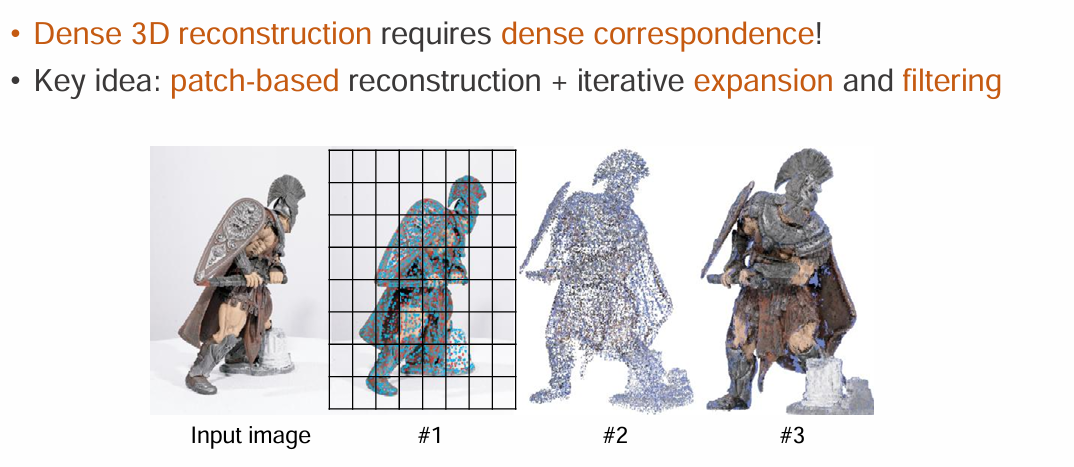
不只是单像素的看, 也不是整体(Visual Hall, 轮廓线求交)的看, 而是分成一个个 patch.
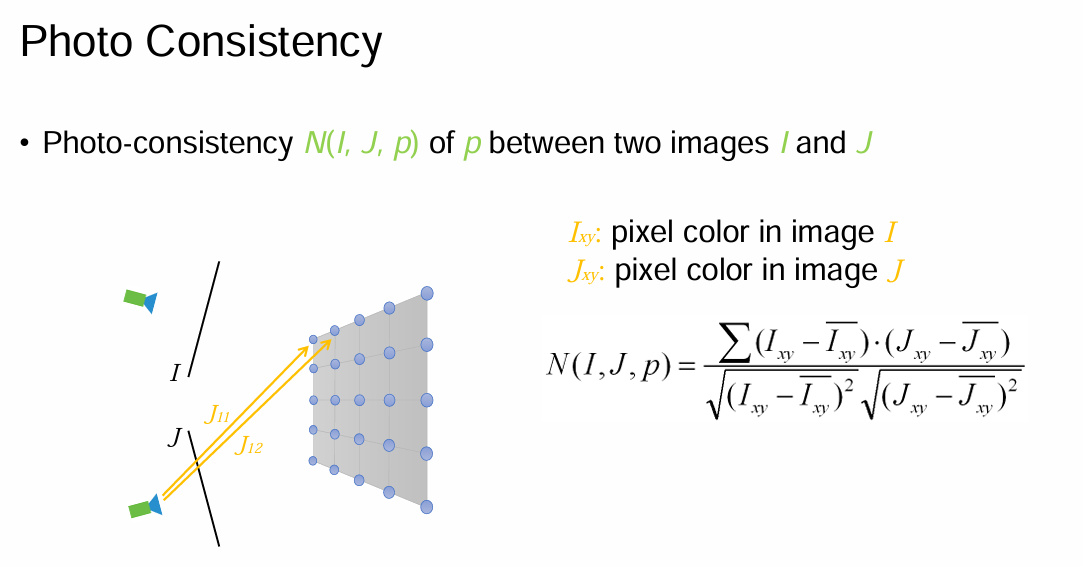
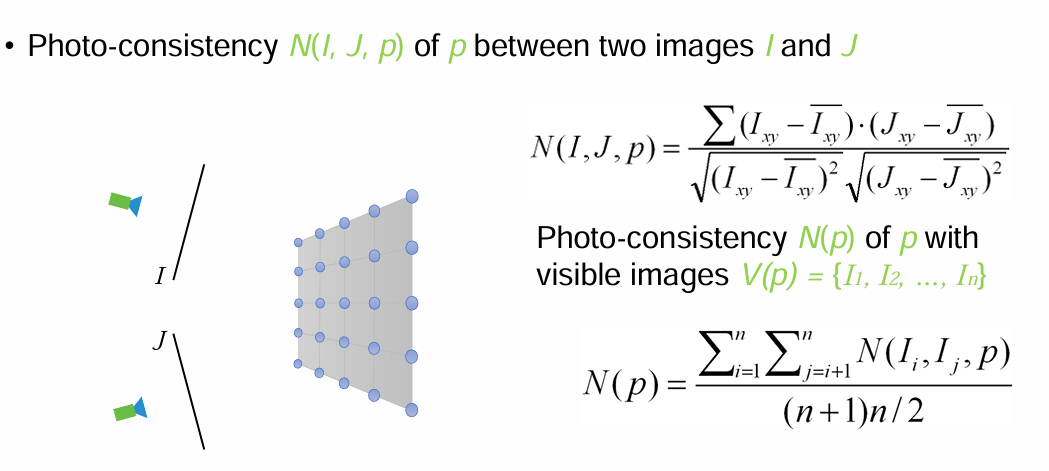
通过调整 \(n(p),c(p)\) 使得 \(N(p)\) 尽可能的大. 因为这是连续函数, 所以可以求导.
例如, 先通过 triangulation 确定一下 \(c(p)\) 的初始值, 然后初始化 \(n(p)\) 为跟第一张照片平行, 然后根据这个初始值去优化.
\(V(p)\) 的更新: 先选出 \(N(i,\cdot,p)\) 总和最大的作为 reference, 然后从这个出发移除掉相似度小于某个阈值的图像.
问题: 可能由于重复纹理导致错误匹配, 实践中要求:
Pipeline¶
先对图像进行划分, 划分成一个个 Patch (例如 9x9 像素块), 每个 Patch 做 Feature Detection
之后从一个图像开始, 做 Feature Matching, 通过多张图片利用上面所述的方法构建三维世界中的 Patch.
这样得到的 patch 比较稀疏, 接下来做 patch expansion.
如果一个 patch 旁边有未形成的 patch, 我们就用它来给邻居进行初始化.
最后进行过滤.