Feature Detection
Edge Detection¶
Sobel¶

Remember to smooth the image before edge detection, otherwise the noise would affect the result.
Notice that:
so we can apply gaussian derivative kernel on the image.
Image Gradient Magnitutde¶
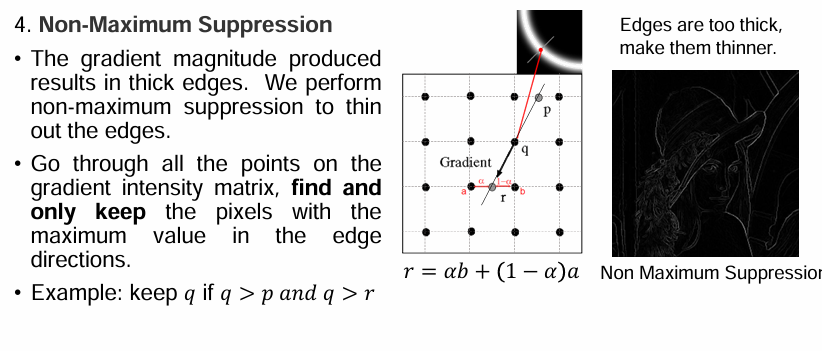
Non-Maximum Suppresion¶
直接使用 gradient magnitude 产生的边缘过厚, 我们采用如下方式将其变细: 对于每个点, 只保留边的方向上梯度幅值最大的点.
Double Threshold¶
> 0.7 认为是边缘
< 0.3 认为不是边缘
中间认为是 弱边.
Edge Tracking by Hysteresis¶
Weak edges that are connected to strong edges will be actual/real edges.
Weak edges that are not connected to strong edges will be removed
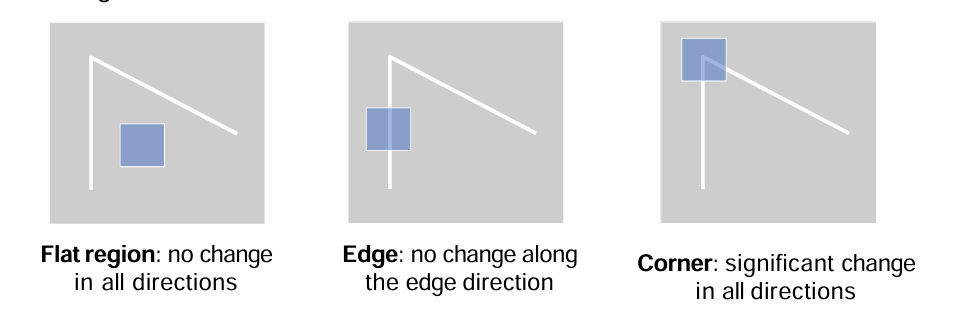
Corners¶
Harris Corner Detector¶
核心观察: 考虑一个窗口内的像素, 角点位置窗口在各个方向移动后像素值均有很大变化.
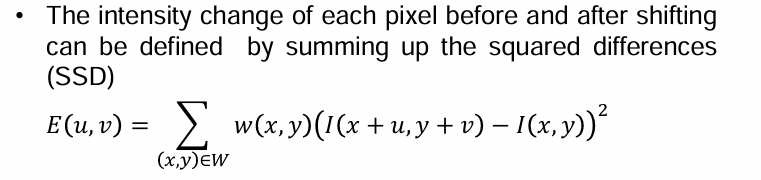
Use Taylor Series to simplify the calculation
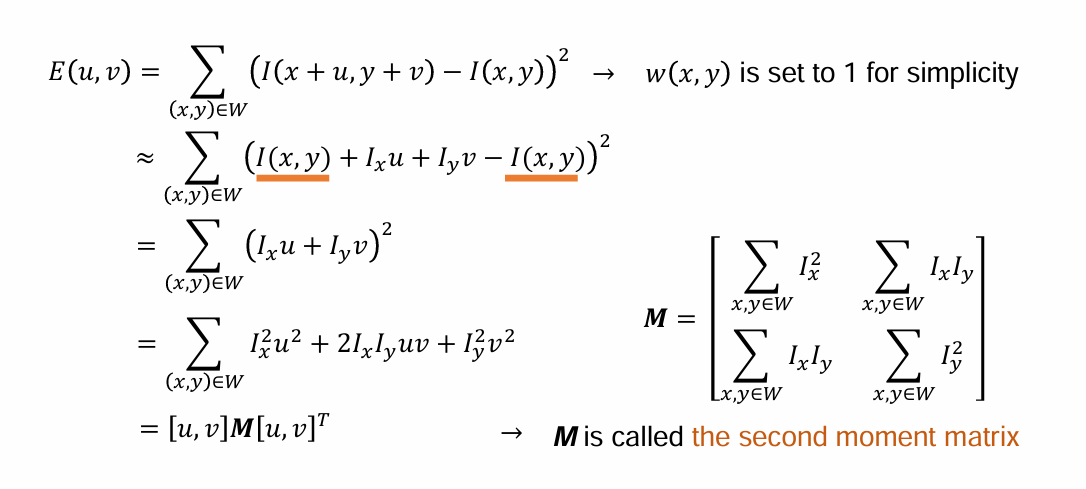
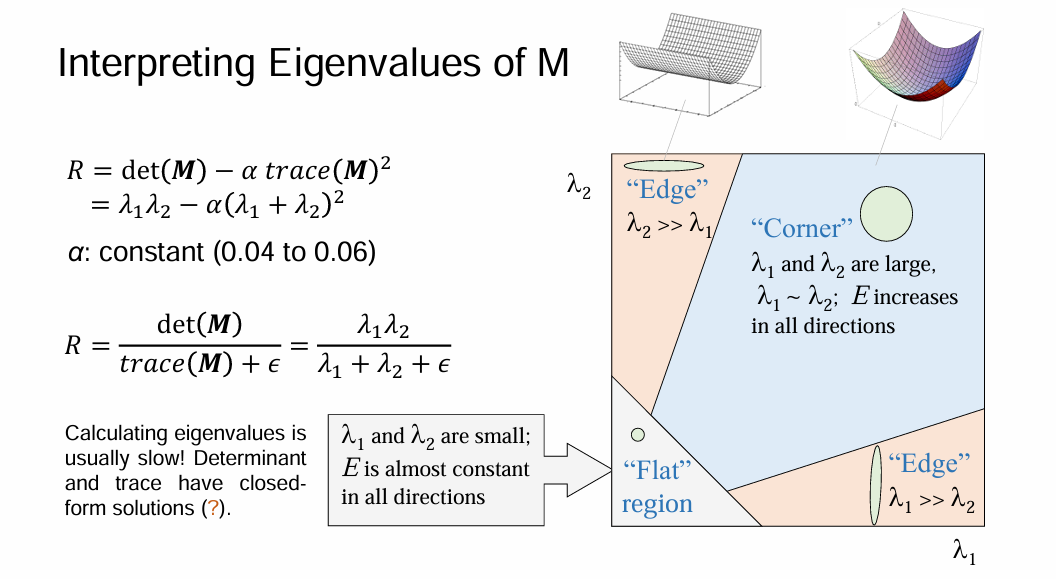
M 的特征值反映了 E 在各个方向的变化幅度
Properties of Corners¶
- equivariant with translation and rotation
- partially invariant to affine intensity changes
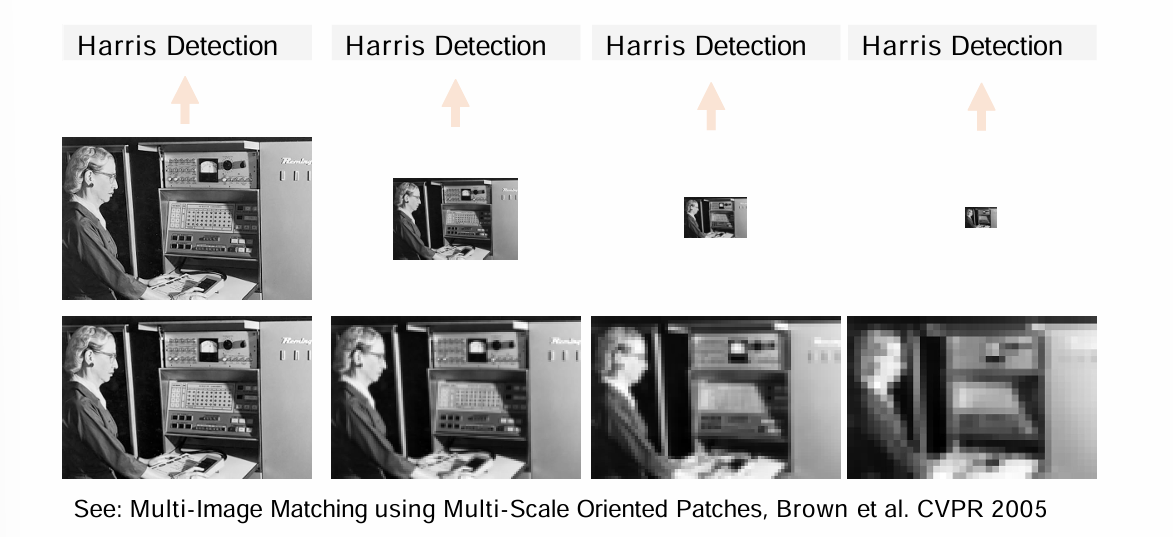
- Corners are not equivariant with scaling
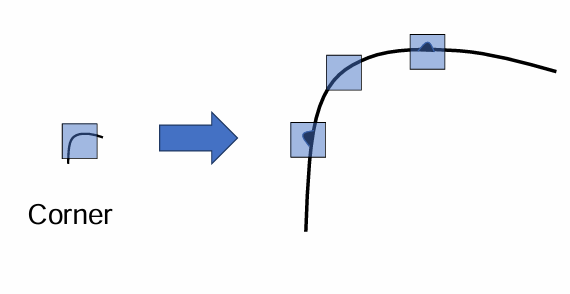
how to make it equivariant with scaling? -- Gaussian Pyramids!
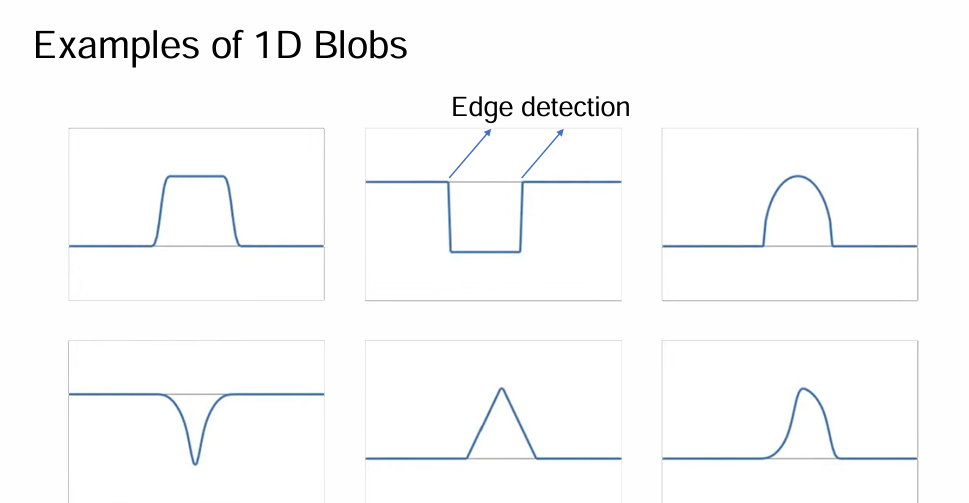
Blobs¶
Blobs are regions in a digital image that differ in properties, such as brightness or color, compared to surrounding regions.
Blobs have fixed positions and sizes, can be localized, and are good interest points.