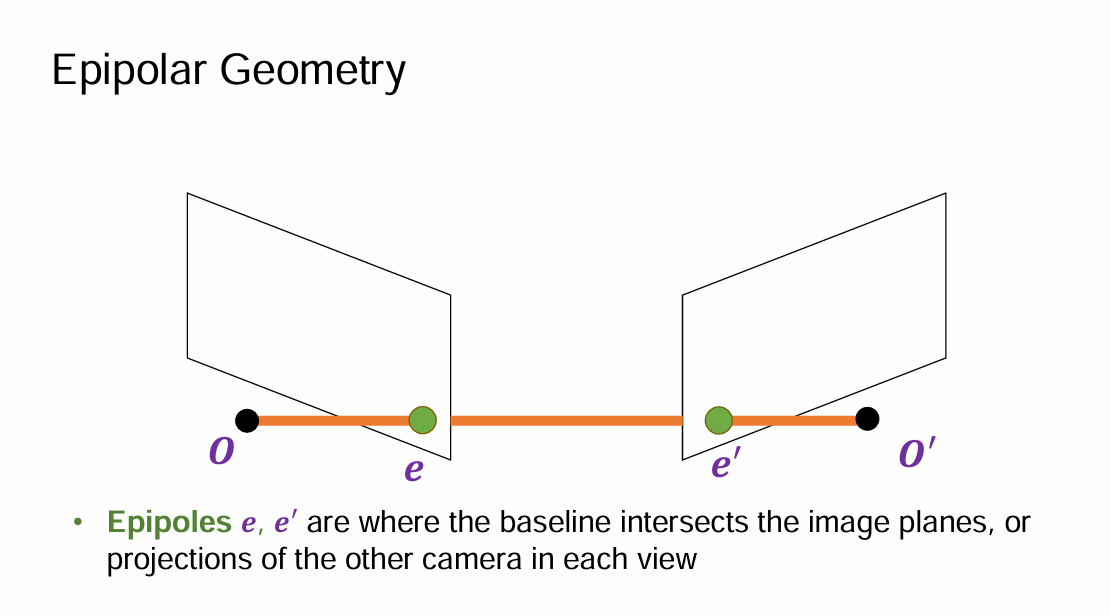
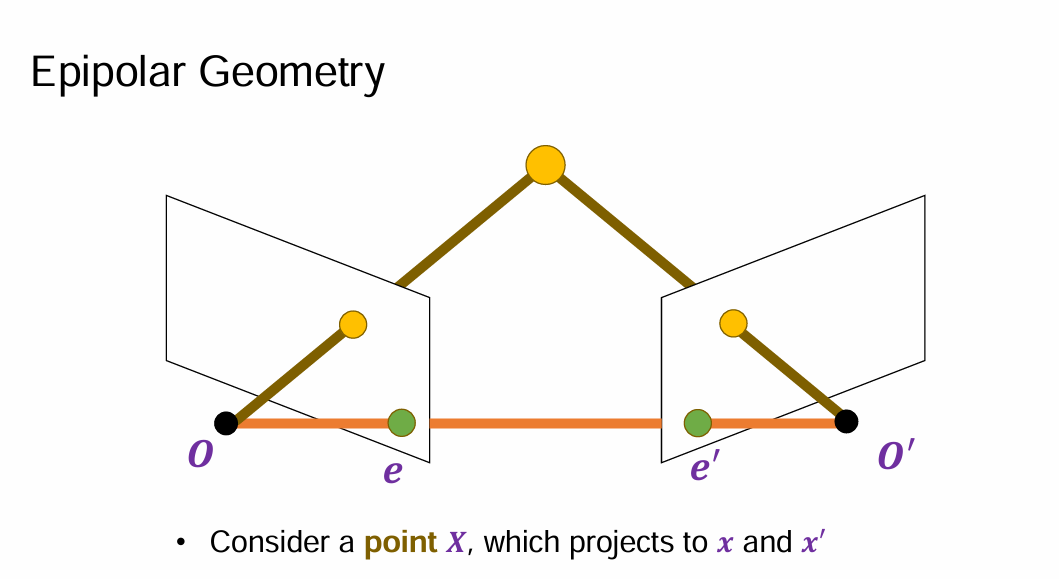
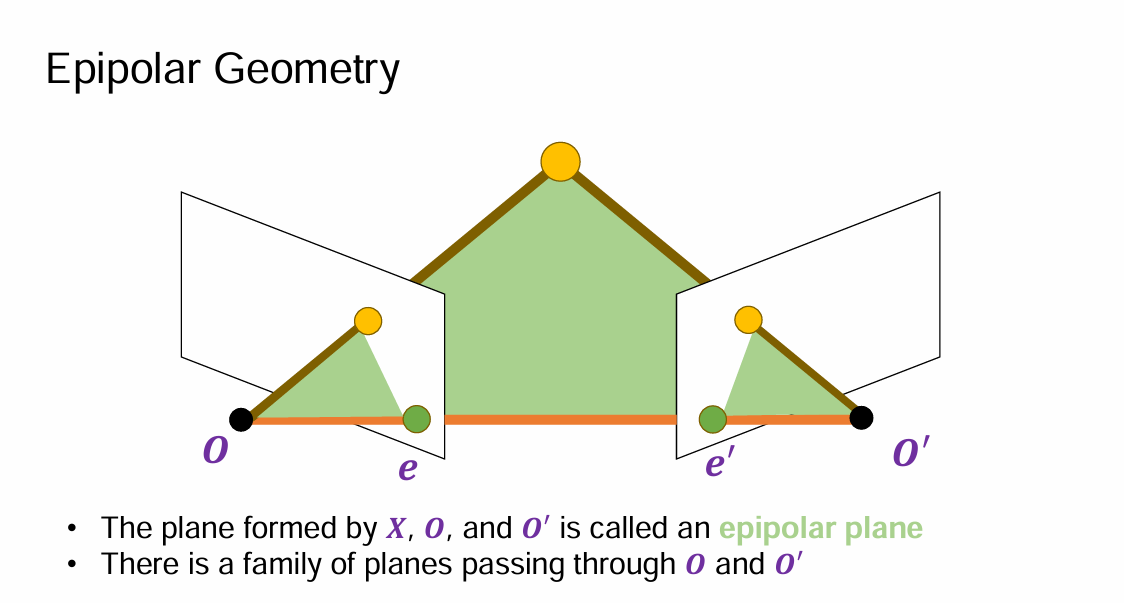
Epipolar Geometry
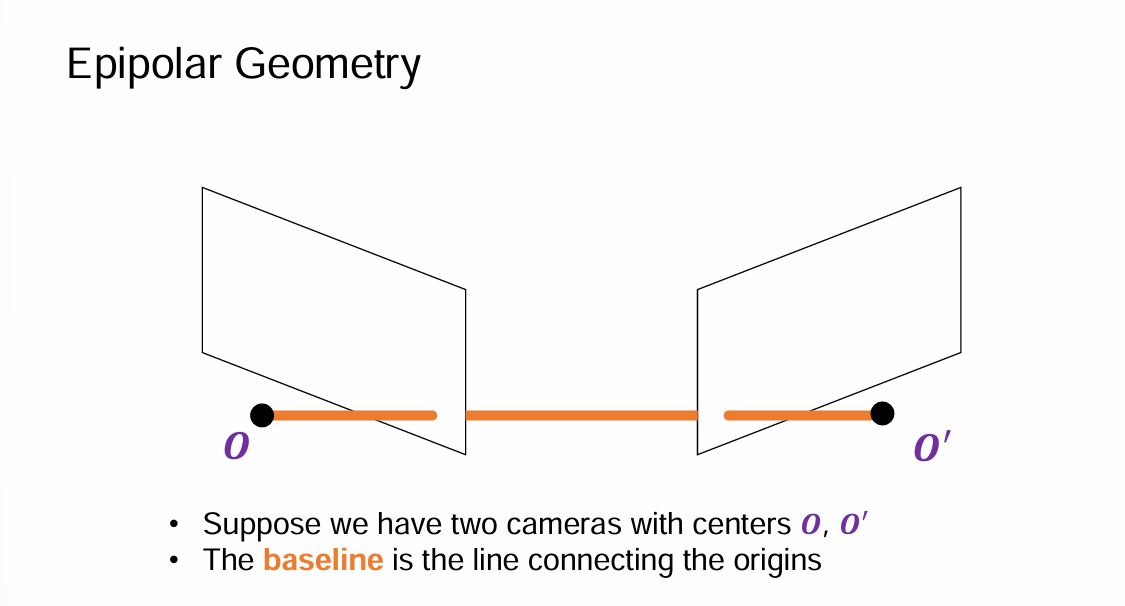
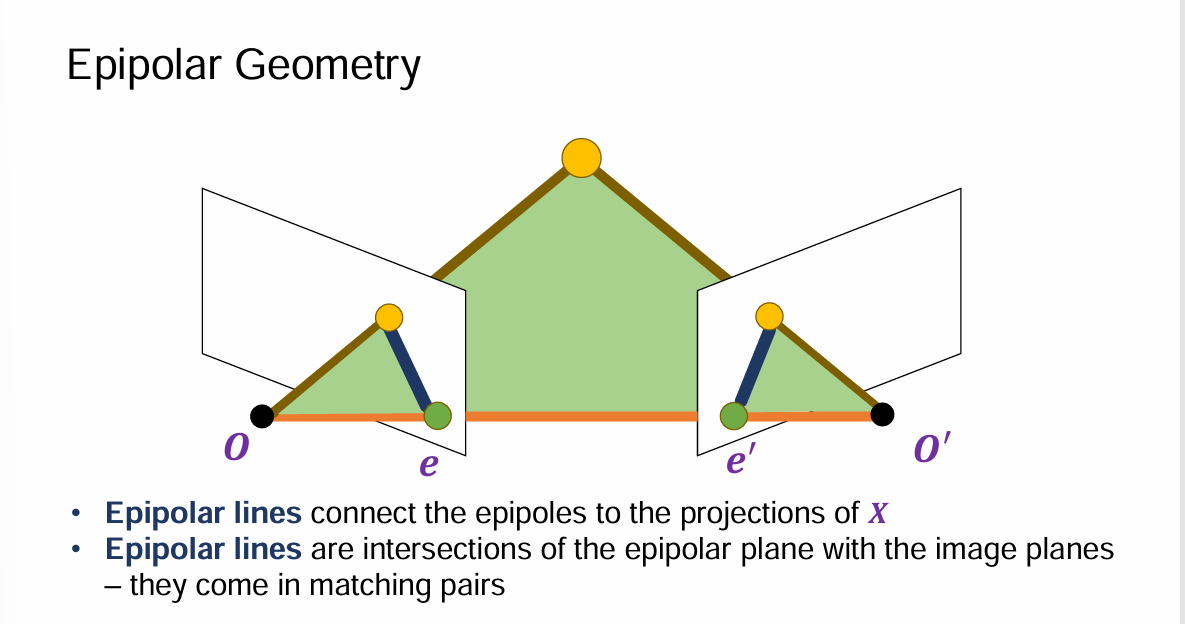
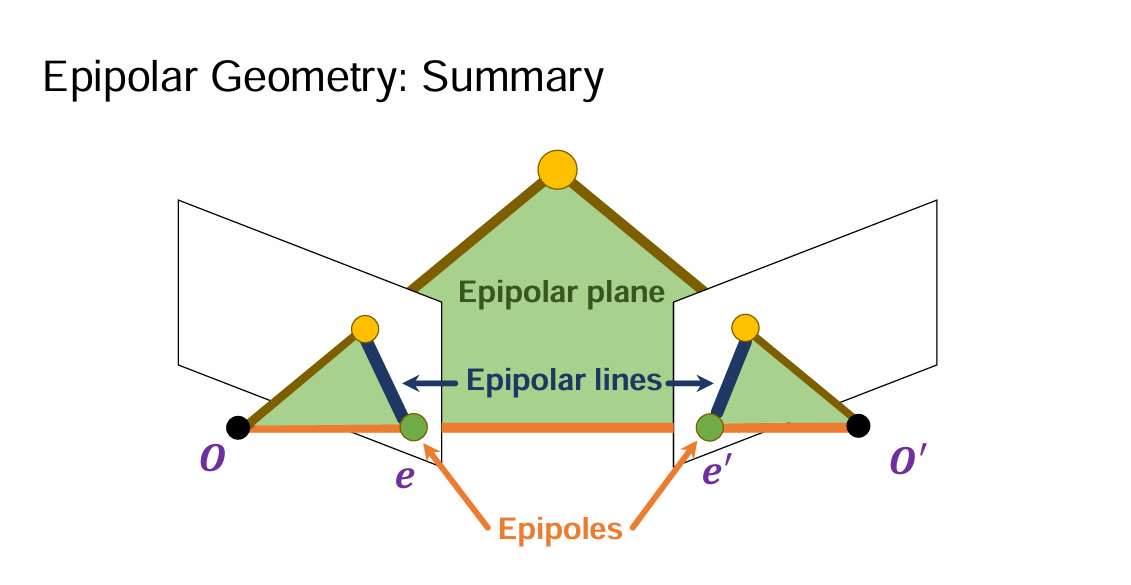
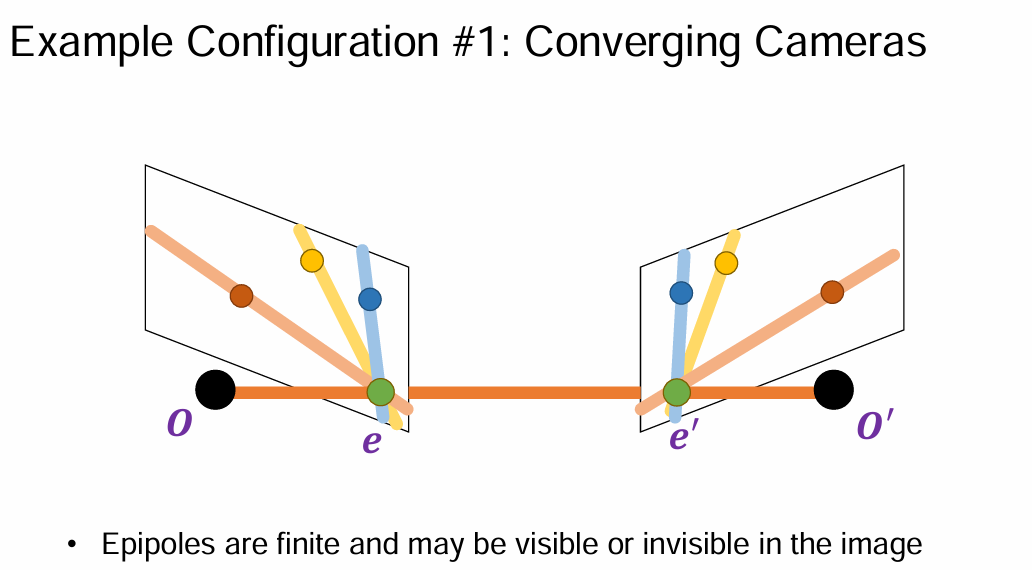
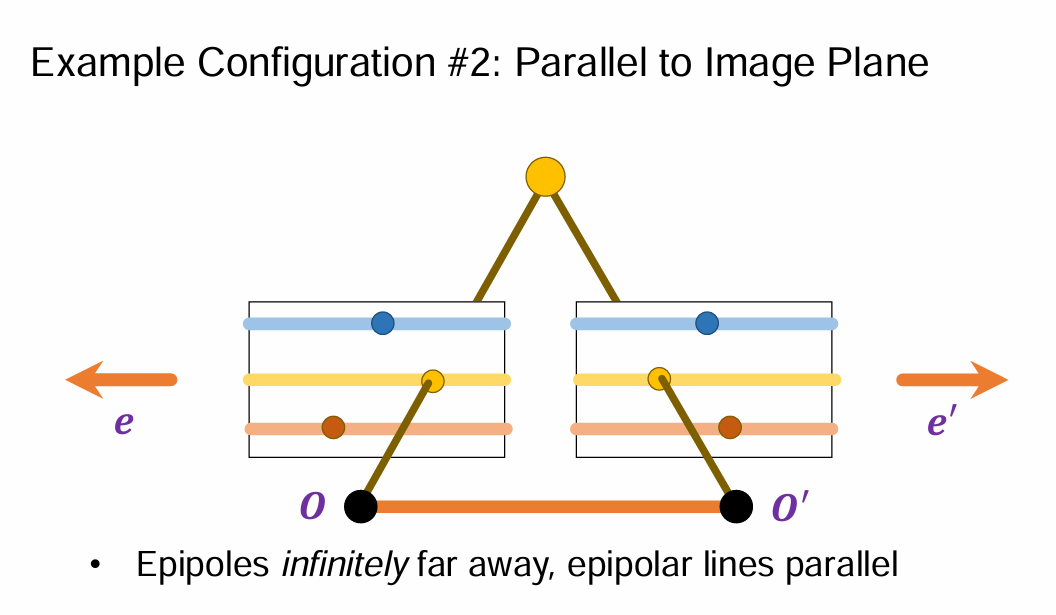
Three Configuration¶
- Convergine Cameras: 基线与成像平面不平行, 极点有限, 极点有可能在成像平面上可见也有可能不可见.
- Parrallel to Image Plane: 成像平面和基线平行, 极点在无穷远处, 极线平行于基线.
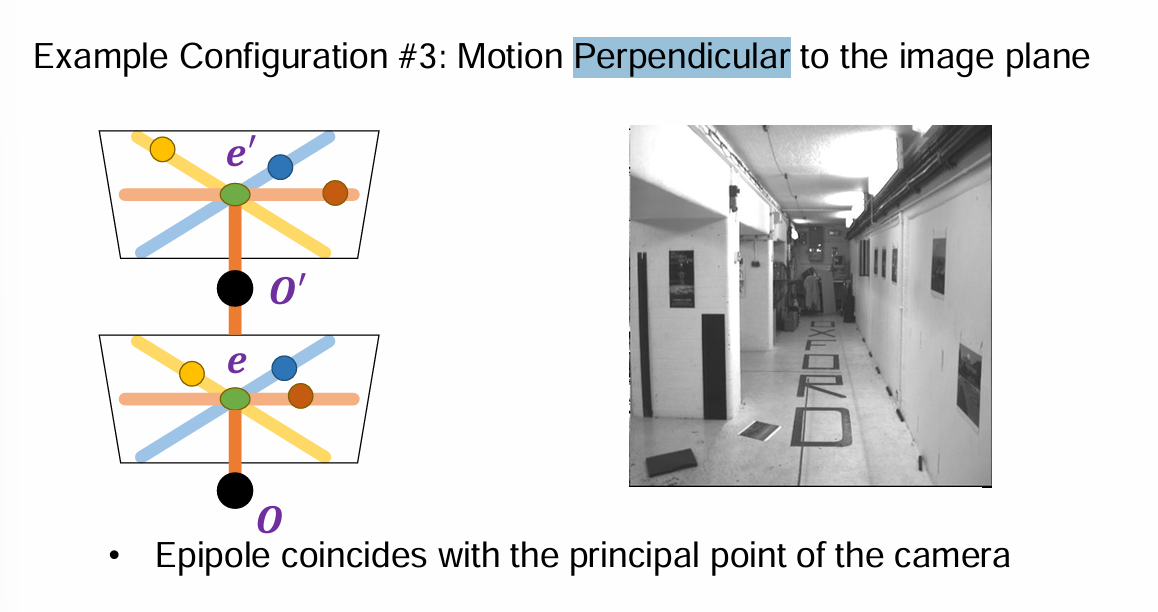
- Motion Perpendicular to the image plane: 基线和成像平面垂直, 成像平面平行, 极点即相机平面主点
Essential Matrix & Fundamental Matrix¶
Warning
即使一组点对满足了对极约束, 并不意味着它们就是相同的 3D 点在各个成像平面的投影.
Calibrated Case¶
Suppose camera intrinsic parameters are known, and the world coordinate system is set to that of the first camera.
The Projection matrices are:
Therefore, we can multiply the projection matrices and the image points by inverse calibration matrices to get normalized image coordinates
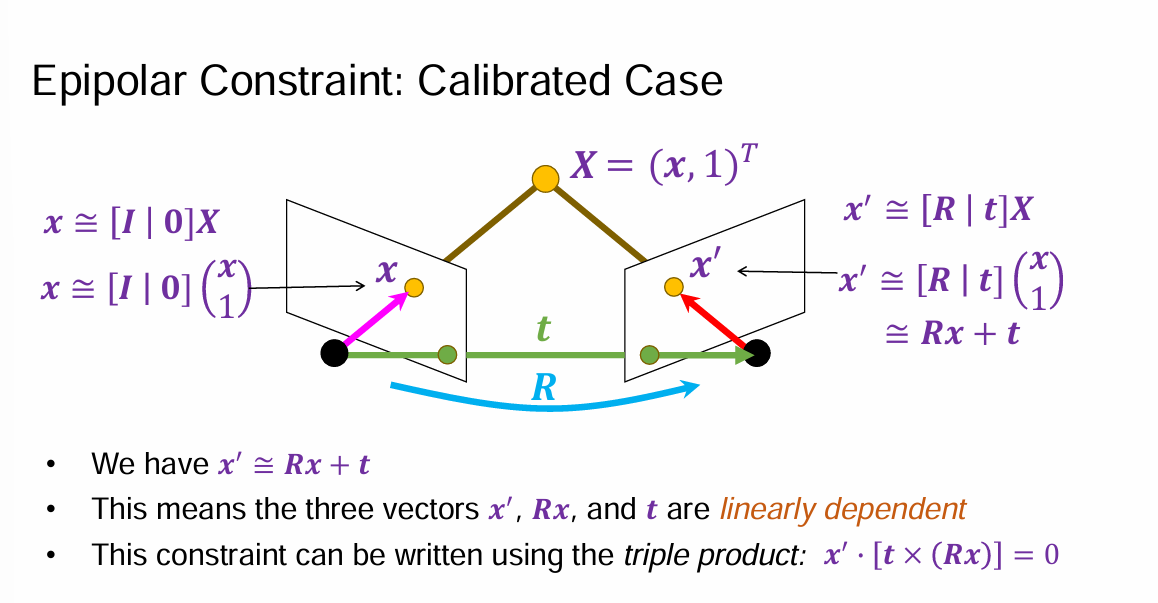
注意到叉乘可以用矩阵表示:
于是条件可以进行转化:
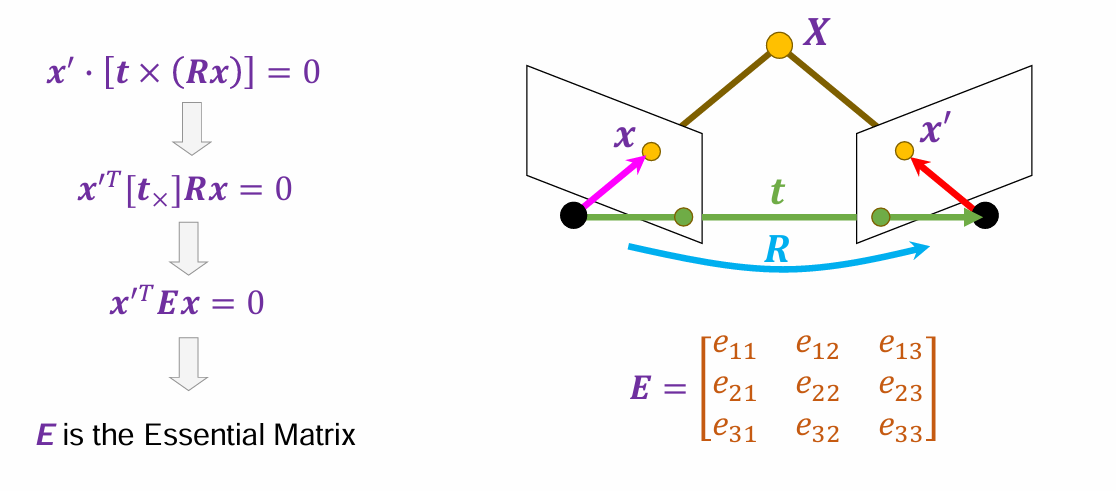
E 矩阵就是 \(t_{\times}R\)
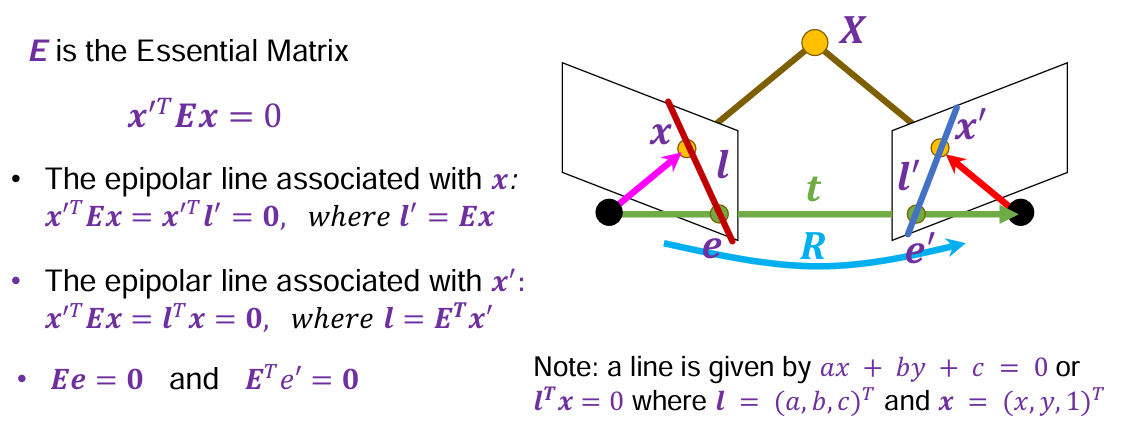
注意到一个三维向量就代表了三维平面上的一条直线 \(ax+by+c=0\), \(Ex\) 就是 \(x\) 在另一个平面对应的极线, \(E^T x'\) 就是 \(x'\) 在另一个平面对应的极线.
E 的秩为 2, 有 5 个自由度. (3旋转+3平移-scaling ambiguity)
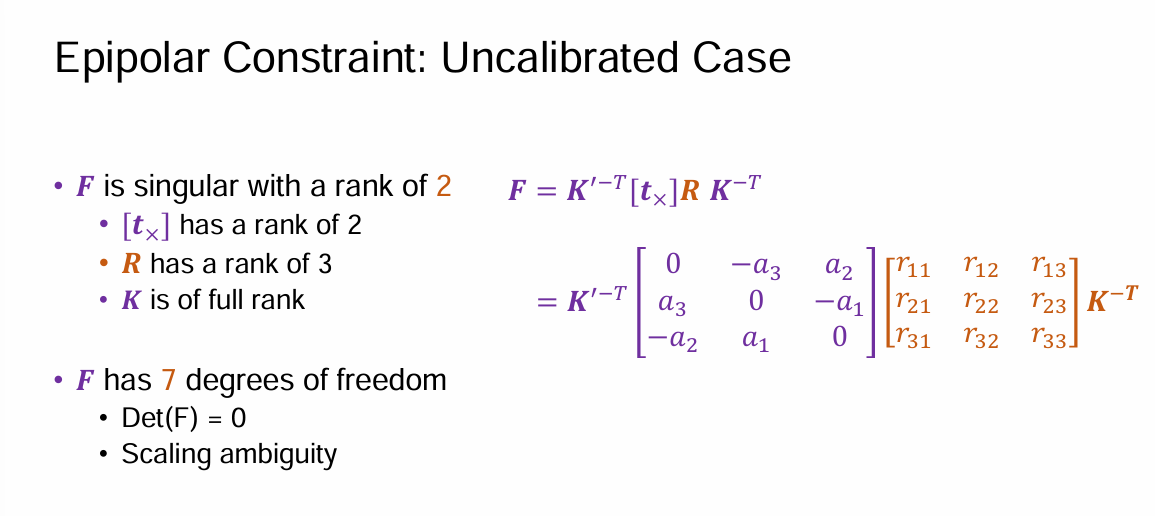
Uncalibrated Case¶
If \(K,K'\) is unknown, then the constraint is:
where
which is called the fundamental matrix.
Rank-2 Constraint¶
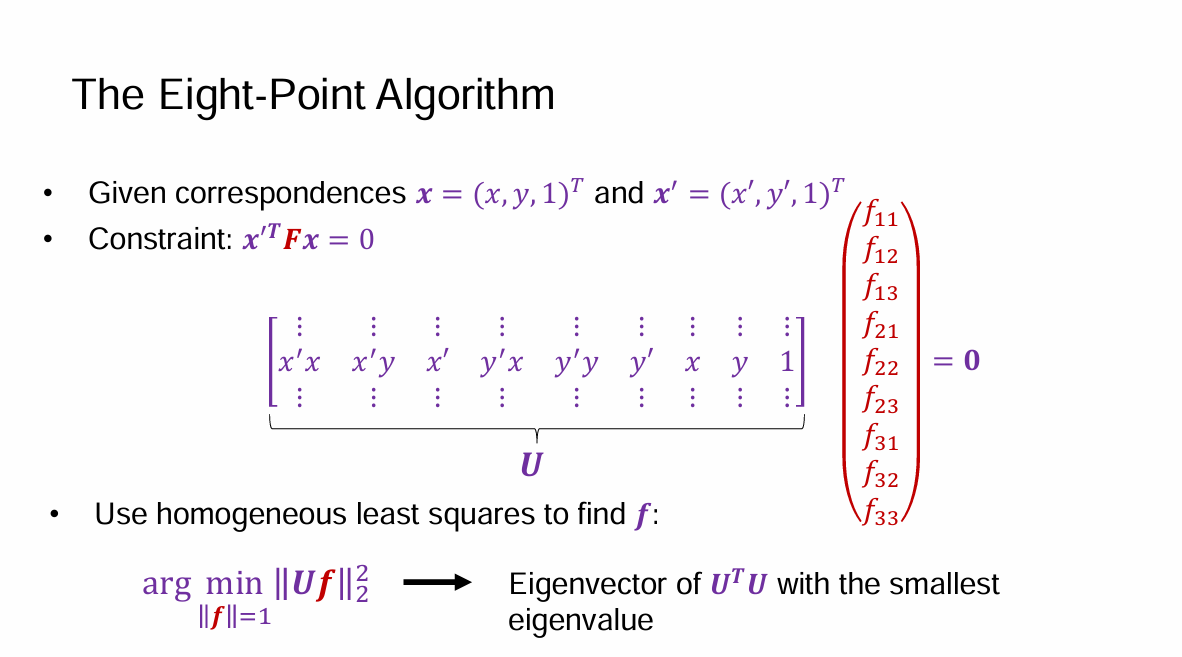
利用 Eight-Point Algorithm 求出的 f 只满足了 \(||f||=1\), 我们还需要满足 \(\text{rank}(f)=2\)
低秩近似: SVD 分解, 将最后一个奇异值置为 0.
Normalized Eight-Point Algorithm¶
注意到 x, x' 是像素坐标, 乘起来有 \(10^6\) 量级, 而八点算法的 \(U\) 矩阵中最小的只有 1.
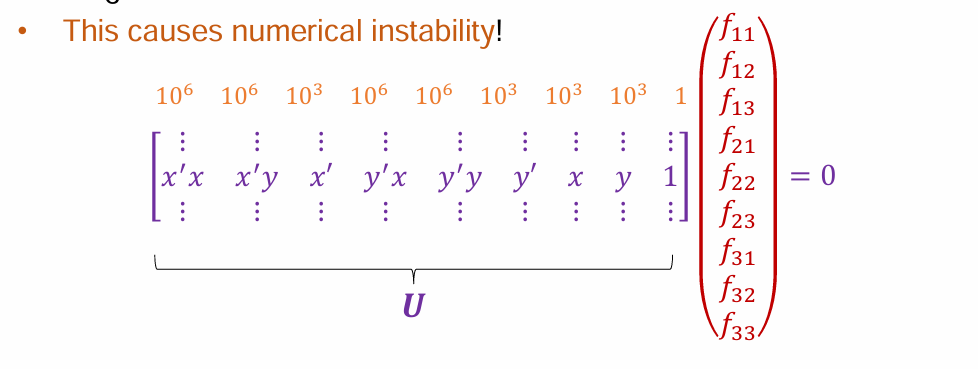
因此, 在每张照片中我们都将其中心平移至原点并且 scale 使得均方距离为 2pixels. 假设 normalize 变换矩阵分别为 \(T,T'\)
则
$$
\begin{align}
x_{normal} &=Tx_{pixel}\
x'{normal} &=T'x'\
x'^T_{normal}F_{normal}&x_{normal}=0\
x'{pixel}T'^TF=0}&Tx_{pixel
\end{align}
$$
比较可知
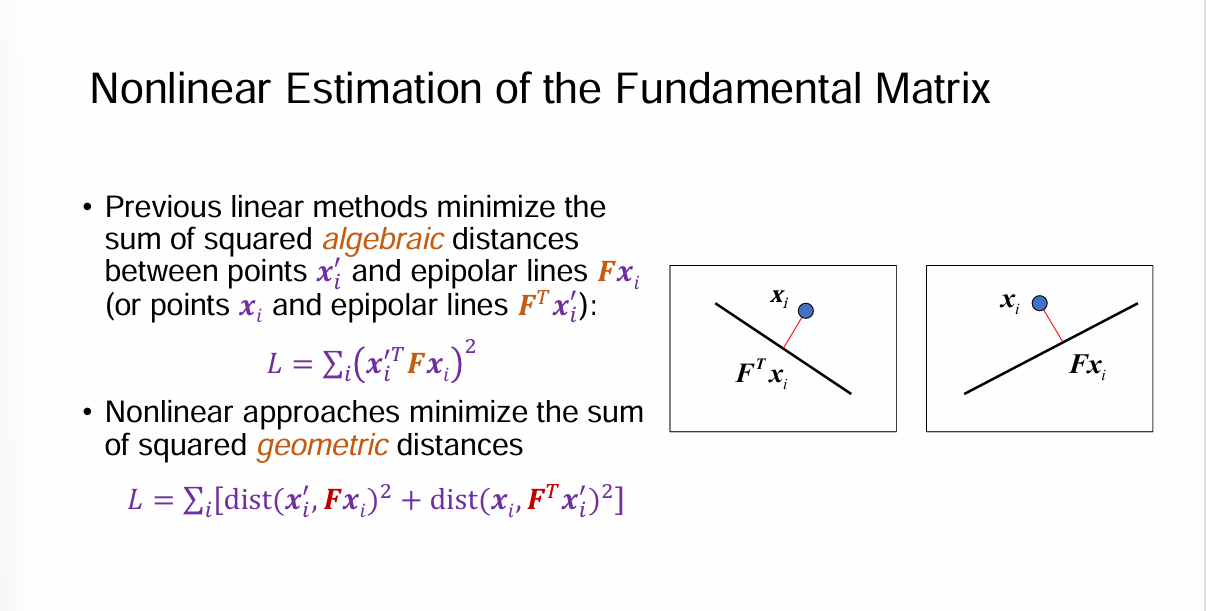
Nonlinear method¶
Applications of the Essential Matrix¶
Decompose R,t from an Essential Matrix¶
令 \(\hat{t}\) 代表 \(t\) 方向上的单位向量, \([\hat{t}]_{\times}\) 作用在一个向量上会使得它 \(t\) 方向上的分量置为 0, 正交平面上的向量旋转 \(90\degree\), 因此可以写成:
其中 \(s_0,s_1,\hat{t}\) 为标准正交基.
Recall 基变换¶
假设原基为 \([e_0, e_1, e_2]\) , 新基为 \([f_0,f_1,f_2]\)
新基在原来的基向量的坐标为 \(x_0,x_1,x_2\), 即:
假设原来某个向量 \(a\) 在原来基向量下的坐标是 \(\boldsymbol{x}\), 在新基下的坐标是 \(\boldsymbol{y}\)
因此
由于 \(Z\) 就是 \([\hat{t}]_{\times}\) 的奇异值矩阵 (不难注意到该矩阵的两个奇异值都是 1, 可以用叉乘的几何意义想象.)
对 \(E\) 进行奇异值分解
由于 \(Z=\Sigma\), 比较可知 \(S=U, R=UR_{90\degree}^TV^T\)
由于符号等问题, 我们需要比较一下 4 组解, 看哪一组更合理.

正负号: 两种情况 (++, --)
\(s_0,s_1\) 交换: 两种情况 (\([s_0,s_1],[s_1,s_0]\), 导致旋转 \(90, -90\))
一共四组解