Camera Calibration
Problem¶
- Given \(n\) points with known 3D coordinates \(X_i\) and known image projections \(x_i\), estimate the camera parameters.
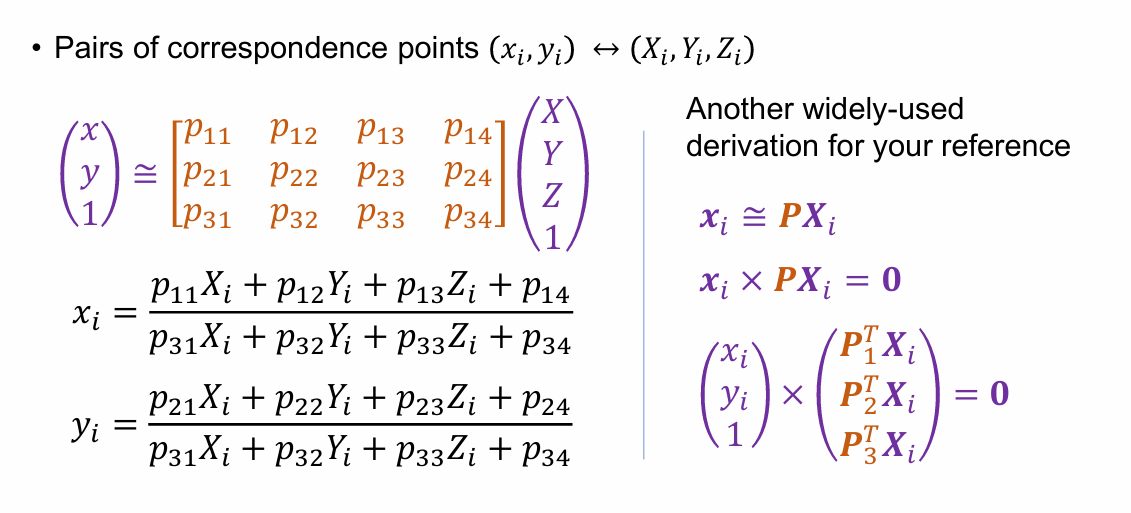
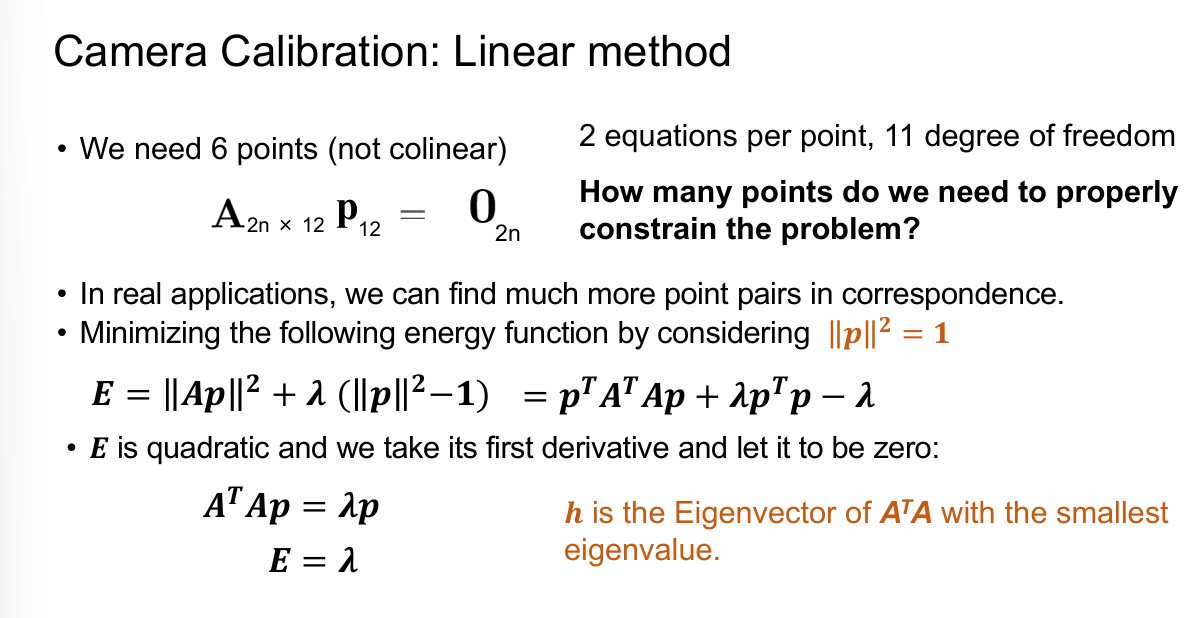
How to get parameters¶
通过最小化 \(||Ap||\) 我们得到了一个近似 \(K[R|t]\) 的矩阵. 如何从中得到 \(K,R,t\) ?
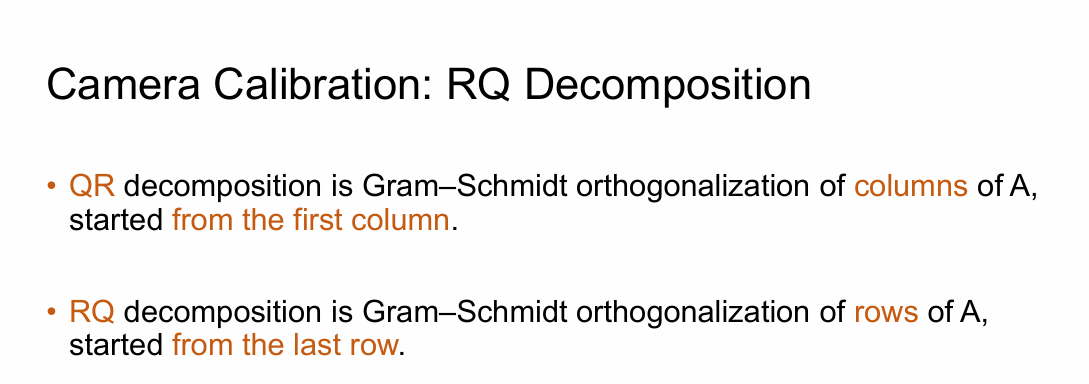
Key observation: \(K\) is a upper triangular matrix, \(R\) is a orthonormal matrix
We can perform \(\text{RQ}\) decomposition to get \(K,R,t\)
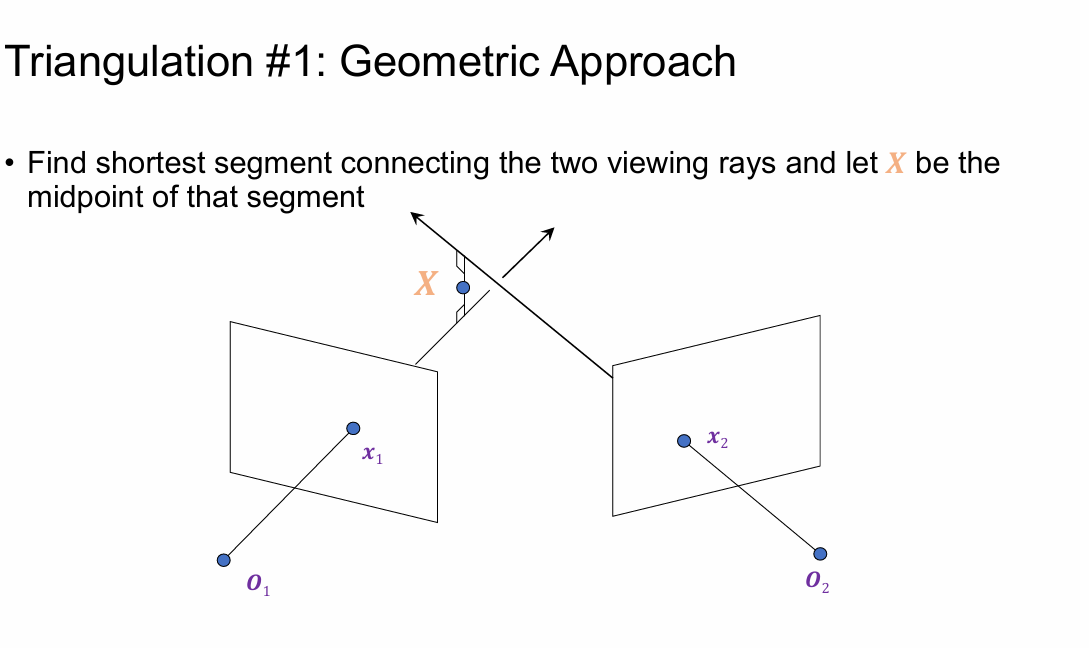
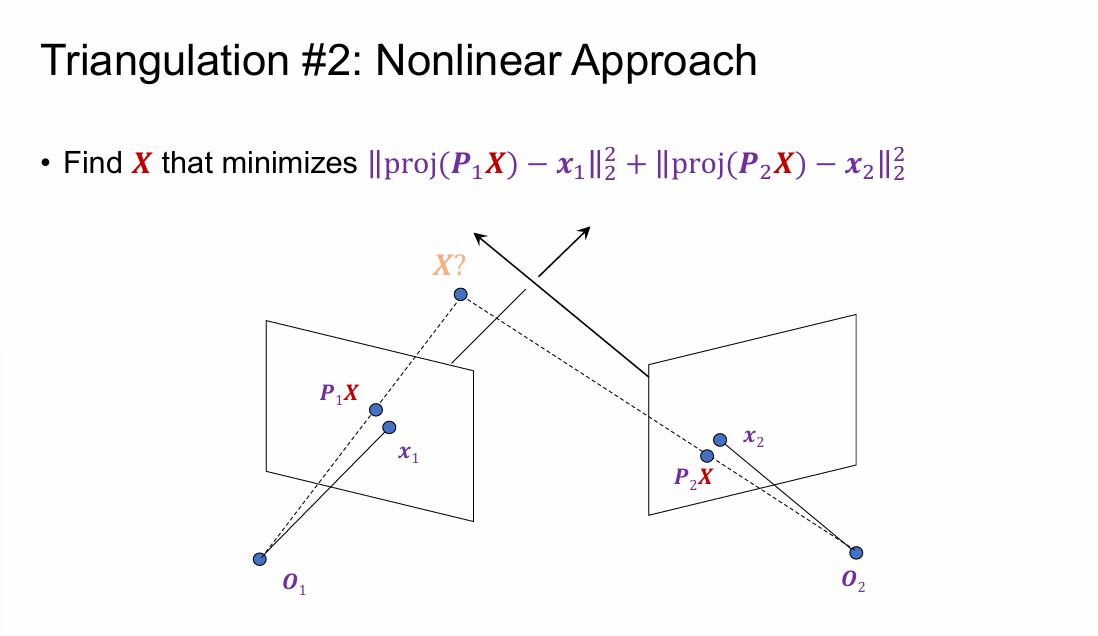
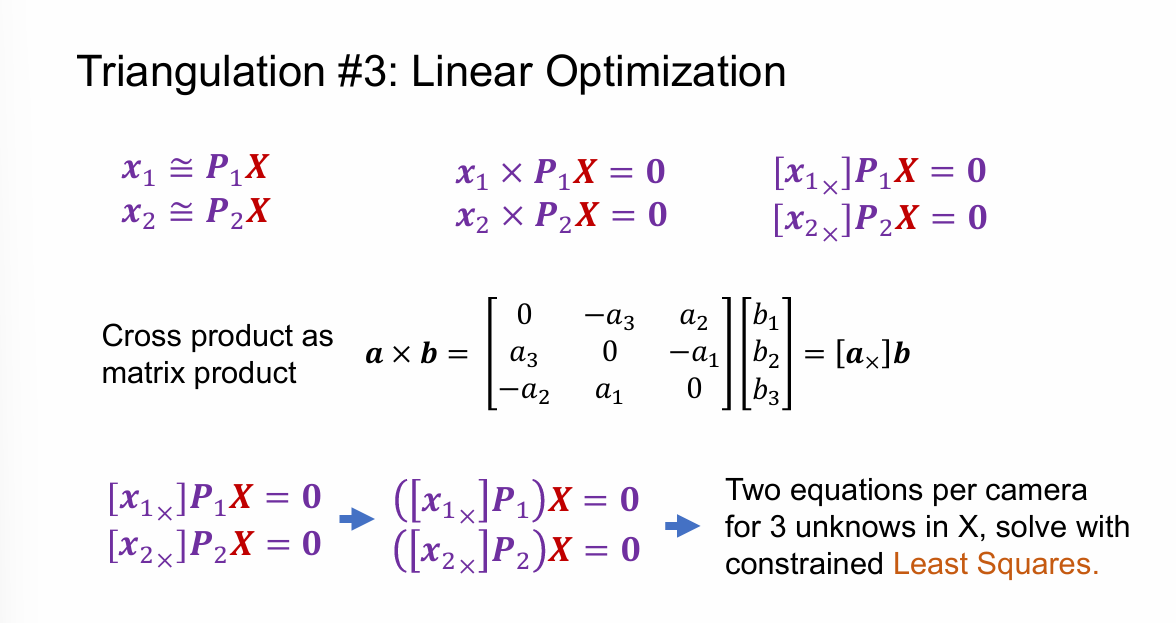
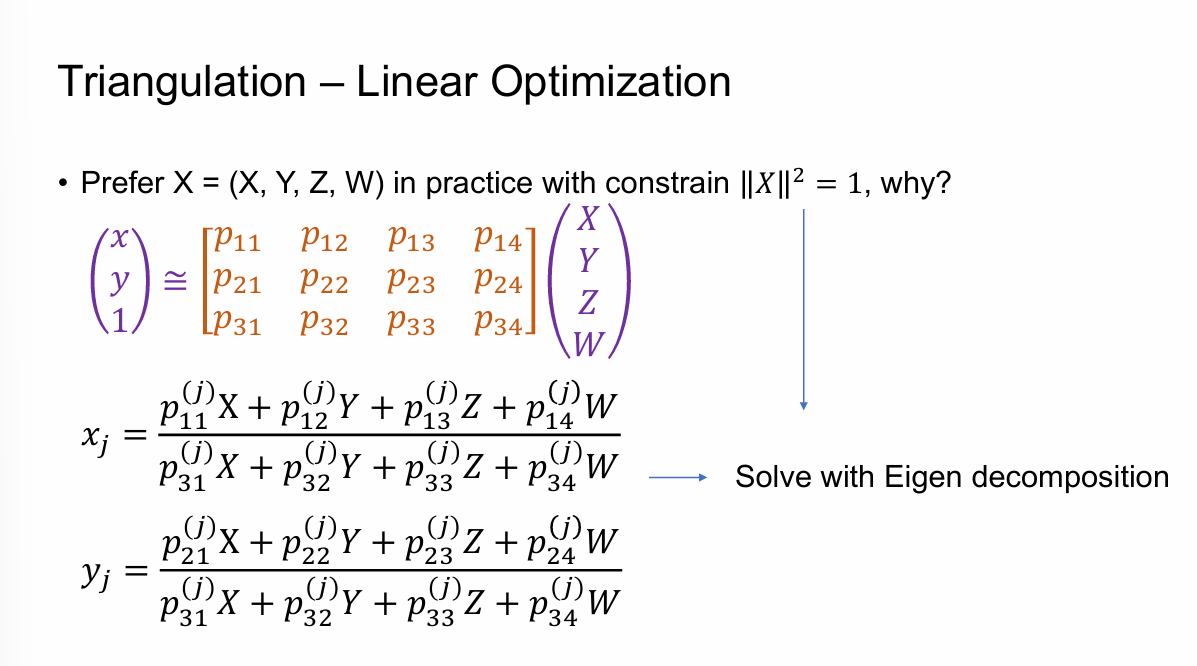
Triangulation¶
得到了两张图的对应点后, 如何重建三维坐标:
直接通过连线相交的方式, 由于噪音的存在, 不一定可以相交于同一点.